V
主页
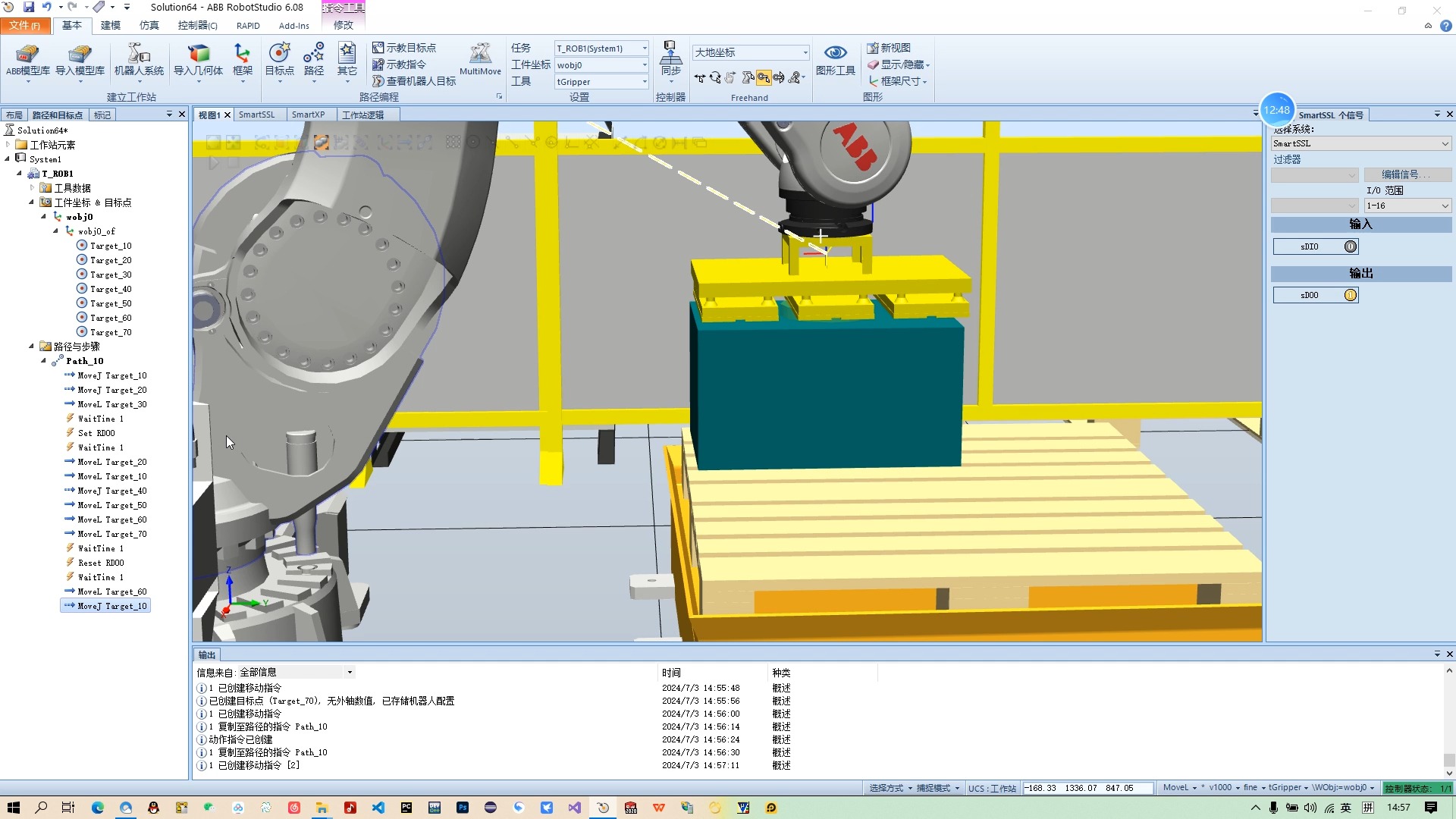
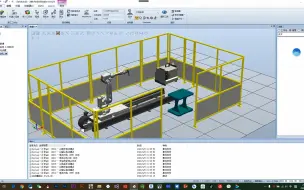
38.搬运码垛【带BUG的】
发布人
打开封面
下载高清视频
观看高清视频
视频下载器
输送链码垛2
21.连接MySQL数据库实现登录、注册、密码修改和个人信息修改等功能【选看】
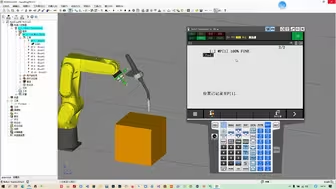
26.发那科机器人简单的示教编程【与ABB的异同】
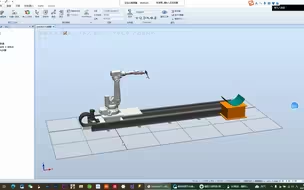
带导轨的机器人(轨迹编程)1
MCGS触摸屏与plc通讯连接
2.带护栏的机器人系统及手动操作
FANUC法那科机器人软件实操与应用技巧
UR优傲机器人拆解更换关节
夹爪smart组件的创建
带导轨的机器人andSmart组件初识
简单的搬运任务
1.0IO信号的定义和基本示教编程
6.焊枪的绘制
登陆界面的创建和使用(SQL数据访问)
学习清华对产品的要求未来将以的清华标准对待每一款产品#自主研发,远程视频回传,实时操控,远程转移危险物品,代替人员执行危险作业#无人车远程控制#远程排爆机器人
1.手动操纵
7,滑动杆和仪表盘
3.气缸绘制(二)
27.发那科机器人坐标系的创建
VEX IQ风驰电掣,自动调节距离的机器人V3.2版,无论距离远近,自动计算,一键生成,百发百中,弹无虚发,上下球门都可。
带导轨的机器人(模块化编程)2
11.激光切割任务
11.活塞运动仿真
23.生成安装包
基于ABB660码垛机器人平衡缸的设计思路,才能将末端负载100公斤的四关节码垛机器人做到成本不比立柱高,另外求教:ABB460码垛机有平衡缸吗?
3.气缸绘制(三)最终
2连杆的设计
3.气缸绘制(三)
20.夹爪smart组件的创建
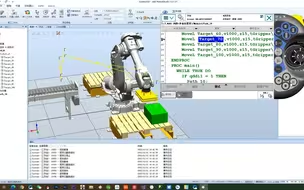
高级编程(码垛)1
调用摄像头6.1
22.工作站逻辑
从0开始制作机械臂---3 SCARA臂展示
1.手指的绘制
30.火花塞搬运二【用For循环和偏移指令】
ABB工业机器人搬运程序的仿真运行
【2024 ROBOCON】预选赛2:北京航空航天大学
简单的示教编程1
SQL数据库的创建和链接
7.注册页面功能的实现(多个combox控件的使用)