V
主页
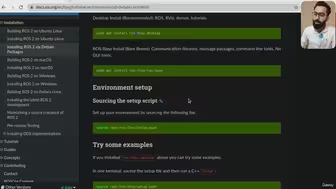
ROS2-How to create a ROS2 package in C++ and Python
发布人
https://www.youtube.com/watch?v=ARIgQfu7ivE
打开封面
下载高清视频
观看高清视频
视频下载器
具有深度学习和计算机视觉的 ROS2 自动驾驶汽车
ROS2 QA 214 How to Install TurtleBot3 packages on ROS2
《ROS 2机器人开发从入门到实践》2.5.2用得到的C++新特性
ROS2从初级到高级(LEVEL2):使用 URDF 设计自定义机器人,在 Gazebo 中模拟机器人
《ROS 2机器人开发从入门到实践》2.5.3.2多线程与回调函数C++示例
2025工创赛物流搬运机器人 赛事解读与问题分析2
ROS2自动驾驶|边做边学(二)地图与定位
C6-2智能车的建图与自主实现教程
《ROS 2机器人开发从入门到实践》2.5.1ROS2基础之编程:面向对象编程C++示例
gdb调试linux内核 从printf到linux内核(一)
ROS2 路径规划和计算机视觉迷宫求解
《ROS 2机器人开发从入门到实践》3.5ROS2基础之Git入门
《松灵ROS 2开讲啦》第六期 Nav2导航应用
《ROS 2机器人开发从入门到实践》3.4.5订阅数据并用Qt显示
ROS2从初级到高级(LEVEL1):掌握 ROS 2 基础知识并成为机器人操作系统开发人员
《ROS 2机器人开发从入门到实践》 2.1.2编写你的第一个节点( C++ 示例)
我回来了-软路由RouterOS防火墙规则之“流量转发指定接口”
《ROS 2机器人开发从入门到实践》2.5.1ROS2基础之编程:面向对象编程Python示例
作为 ROS1 开发人员学习 ROS2 并迁移您的 ROS 项目
《ROS 2机器人开发从入门到实践》4.3.1自定义服务接口
ROS+OpenAI(3-3)基于python3的DQN用于Cube机器人
在Python和C++中使用ROS2
《ROS 2机器人开发从入门到实践》3.2.1通过话题发布小说
用python学习数学
使用相机在ROS下的TensorRT量化推理yolo模型以及使用BYTEtrack算法进行目标跟踪部分的更新
《ROS 2机器人开发从入门到实践》2.5.3.1多线程与回调函数Python示例
微雪 ROS2全新升级版 4-DOF大扭矩总线舵机机械臂
《ROS 2机器人开发从入门到实践》3.1话题通信介绍
基于yolo和moveit的图像识别机械臂目标抓取搬移
《ROS 2机器人开发从入门到实践》4.3.3客户端代码实现
(开源)哪吒ROS2 -快速上手案例 >> NeZha_Mini ROS2 学习教程(旭日派、视觉AI、建图导航、自动驾驶、服务、智能救援机器
PyRoboLearn_ create an inverted pendulum RL environment from scratc
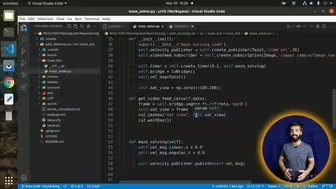
强化学习在ROS2中实现巡线小车
《ROS 2机器人开发从入门到实践》4.2.4人脸检测客户端的实现
宇树K1机械臂的视觉抓取仿真
(开源)哪吒ROS2 -基础使用--远程开发环境搭建 >> NeZha_Mini ROS2 学习教程(旭日派、视觉AI、建图导航、
《ROS 2机器人开发从入门到实践》4.4.1参数声明设置
这绝对是B站最详细的C++后端开发公开课教程,从0到深入(保姆级教学)小白也能学会!
ROS多线程 与 Linux进程(2)
《ROS 2机器人开发从入门到实践》3.3.2订阅pose实现闭环控制