V
主页
ROS+OpenAI(3-3)基于python3的DQN用于Cube机器人
发布人
一起来学ros,强化学习!
打开封面
下载高清视频
观看高清视频
视频下载器
乐高-球形机器人
ROS+OpenAI(11)基础7-tf2坐标变换与四元数
ROS+OpenAI(15)ROS-control
ros+openai(1)简介
ROS+OpenAI(4-1)从零开始创建智能小车-建模
[开源]Moveit ROS Control Robot demo and Code details
破解肢体语言的秘密,用于机器人技术
ROS+OpenAI(7)基础3-“服务”
ROS+OpenAI(13)urdf进阶-xacro
ORB-SLAM2实操难吗
也是玩上ROS了
ROS Robotics Tutorials _ Robot Operating System
ROS+OPENAI(4-4)多机器人简单示例
Gazebo中的板球平衡系统
10款优异的军用机器人
ROS2功能包与三大通信机制编程
ROS+OpenAI(10)基础6-ROS时间
arduino官方自平衡自行车资料解读(1)套件组成与软件环境安装
7款 变形机器人
第25讲:Egoplanner集群仿真
钧舵EPG50-60柔性夹爪 ROS SDK–法奥FR3长臂猿模式
Deploying ROS Node on Raspberry Pi
ROS多线程 与 Linux进程(1)
Installation of TensorFlow on Raspberry Pi
ORB-SLAM2究竟是什么
PyRoboLearn_ Dynamics
室外ROS 深夜调车,一鼓作寄
turtlebot3 gazebo wheel slip
ROS+OPENAI(16)shell的简单使用
串并混连 双足机器人
ROS+OpenAI(12)基础8-数据记录与导出
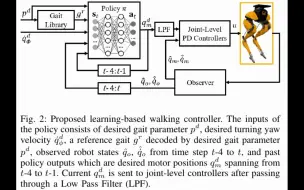
PPO 双足机器人行走 论文
ROS2-How to create a ROS2 package in C++ and Python
泰坦尼克号乘客生存预测——项目简介——后端python代码
纯自学ROS,改装小车手搓RGB相机云台
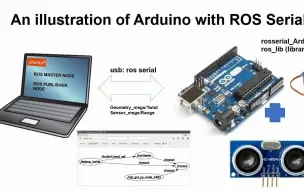
ROS Arduino tutorials _ ROS Arduino serial communication example - Part 1
ROS Arduino serial communication example - Part 1
Bobble-Bot 介绍
做的很棒的几款飞行机器人
最新分体式火星车