V
主页
【ICRA 2024 | 机器人】基于学习方式利用混合密度网络的多模态运动规划
发布人
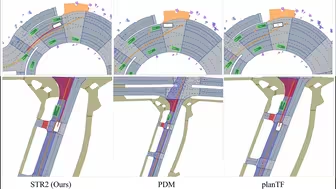
摘要:在运动规划算法中,计算时间和路径最优性之间的权衡是一个重要的考虑因素。经典的基于采样的算法在高维规划中计算效率不足,而基于学习的方法在实现时间效率和最优运动规划方面显示出巨大的潜力。基于SOTA学习的运动规划算法利用基于采样方法生成的路径作为专家监督数据,并通过回归技术训练网络。然而,这些方法往往忽略了训练集中最优路径的重要多模态特性,使得它们在某些场景下无法找到好的路径。本文提出了一种基于混合密度网络的多模态神经元规划器(Multimodal Neuron Planner, MNP),该方法明确考虑了训练数据的多模态,同时实现了时间效率和路径最优性。对于以点云为代表的环境,MNP首先通过编码适合处理点云的网络,将点云有效压缩为潜在向量;然后,我们设计了多模态规划网络,使MNP能够学习和预测多个最优解。仿真结果表明,该方法优于基于SOTA学习的MPNet方法和基于高级采样的IRRT*和BIT*方法
打开封面
下载高清视频
观看高清视频
视频下载器
赵行团队新作 | 通过专家混合 模型提升自动驾驶运动规划器的 泛化能力,实现性能新SOTA
温和的走进深度学习
【本科生毕设答辩】基于轨迹学习的移动机器人避障算法的设计与实现
真的超容易“搞深度学习神经网络到底怎么改代码的啊?”复旦博士教我用一本书搞定!
深度学习+遥感,这口饭得趁热吃啊!绝佳A会创新点!!!
NeurIPS'24 | DHD: 多无人机协同感知框架,提升 目标轨迹预测的准确性和全面性
2024吹爆!李永乐老师深度讲解AI!带你了解电脑如何像人一样思考,带你学习AI前沿技术/人工智能/机器学习/深度学习/神经网络/计算机技术
Neural MP - 跨任务运动规划的通用机器人控制策略
深度学习环境配置一套搞定:anaconda+pytorch+pycharm+cuda全详解,带你从0配置环境到跑通代码!
15分钟教会你怎么跑通官方模型数据集,怎么替换成自己的数据集,怎么跑通自己的数据集!--人工智能/深度学习/神经网络/计算机视觉
多模态模型CLIP深度讲解
太厉害了 已跪!终于有人能把知识图谱讲的这么通俗易懂了,浙大知识图谱入门及实战公开课分享!-深度学习丨NLP丨知识图谱
【附源码】2024最新53个大模型实战项目!练完即就业Ⅰ基础到框架Ⅰ适合小白入门_LLM_RAG_Agent_ChatGPT_Prompt
今年的ICRA你中了吗?
超全超简单!一口气刷完CNN、RNN、GAN、GNN、DQN、Transformer、LSTM、DBN等八大深度学习神经网络算法!真的比刷剧还爽!
强推!草履虫都能一口气学完CNN、RNN、GAN、GNN、DQN、Transformer、LSTM、DBN等八大深度学习神经网络算法!真的比刷剧还爽!
比刷剧还爽!2024最新Python金融分析与量化交易实战教程!3小时入门到进阶!全程干货无废话!(AI人工智能丨数据分析丨数据挖掘丨深度学习丨编程丨大数据)
温和的走进深度学习(下)
喂饭教程!25分钟本地部署Qwen2大模型:配置、微调、部署+效果展示,带你训练自己的行业大模型!
这才是科研人该学的【YOLO算法全系列】,一口气学完目标检测yolov1-v11,100集算法原理+项目实战,通俗易懂,草履虫都能轻松学会!机器学习|深度学习
MLLM多模态大模型三大奠基模型:VIT/CLIP/BLIP模型原理详解+项目实战,通俗易懂的大模型入门教程!
超越GPT-4o mini!北大开源国产多模态版o1,超强视觉推理惊呆网友
第一篇全华班IEEE TRO best paper :分布式快速协同探索多无人机系统RACER
用代码合成的抽象图表构建多模态基准|EMNLP 2024浙大张文祺
两小时入门PyTorch深度学习神经网络(绝对快速!绝对通俗!绝对易懂!)
【强推】研一、研二必学!60套深度学习项目实战 ,原理详解+项目实战,看完就能跑通,毕设有救了!-人工智能/深度学习/机器学习/神经网络
【YOLOv11】一小时速通版!知名博士逐一解读配置文件以及代码复现,环境安装+推理+自定义数据集搭建与训练,入门到精通!
每个初学深度学习的小伙伴只需要学这三个项目!学完以后可以说没有什么深度学习代码能够难住你!
一次学懂多模态算法:ALBEF模型
突破个人能力天花板,和AI协作的12个范式。
2024吹爆!小白也能看懂的深度学习数学书,带你直击神经网络的根本原理!
【AI虚拟伙伴】对接本地Ollama VLM教程 图像识别多模态大模型推荐
人工智能需要哪些高级的数学知识?
【量化交易教程】全100集(完整版)清华大佬耗时一月讲完的系统python金融分析与量化交易实战课程,包含基础教程,进阶学习,项目实战案例讲解,存下吧,比啃书好
从入门到精通一口气学完CNN、RNN、GAN、GNN、DQN、Transformer、LSTM等八大深度学习神经网络!丨零基础篇
深度学习实战2 神经网络计算动画 动态视觉解锁AI的核心 一步步看懂AI背后的计算魔法
新时代降临!多模态大模型的结构范式都有啥?
(CVPR 2024)即插即用高效上采样卷积块EUCB,涨点起飞起飞了
【研三】自研多模态大模型架构——长时程、高鲁棒
研一刚入学,从未接触过神经网络python也是才开始学,现在导师要我做LSTM,我应该去学什么?