V
主页
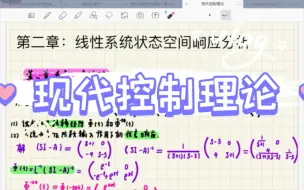
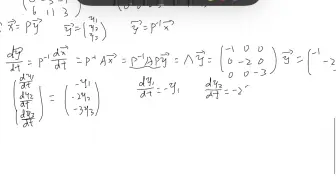
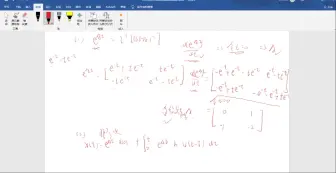
现代控制理论-状态矩阵对角化方法
发布人
打开封面
下载高清视频
观看高清视频
视频下载器
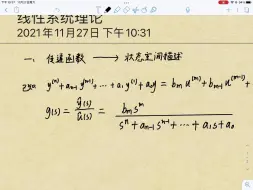
《现代控制理论》之如何求解状态转移矩阵和状态方程的解?
现代控制理论基础-能观标准型-能控标准型转化(期末考试复习自用)
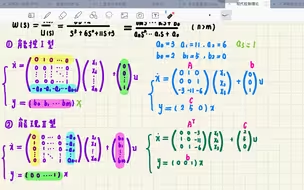
传递函数转换成状态方程(方法一)
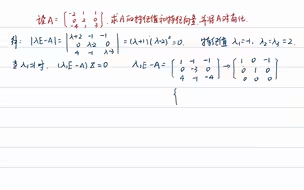
矩阵的特征值特征向量以及对角化
自动化控制考研全程班—《现代控制理论》第九讲 “实现问题 能控标准型 能观标准型 约旦标准型 例题”
现代控制理论 状态转移矩阵求解的四种方法 约当标准型 广义特征向量
怎样将矩阵对角化?
可能是全b站最好理解的现代控制理论课(持续更新)
求矩阵A约当标准形(方法一)
对称矩阵的对角化
现代控制理论基础-能控性和能观性判断(期末考试复习自用)
快速判断:矩阵是否可以对角化
<每日一题>考研自动控制原理之设计状态反馈矩阵配置极点
线性系统理论——对角线规范型
现代控制理论基础-状态转移矩阵、状态响应(期末速成,期末考试复习自用)
现代控制理论-系统矩阵A的求解方法
指纹练题6 全维状态观测器 能观标准型 能控标准型 传递函数求解 快速解题技巧 现代控制理论 考研控制 自动化
现代控制理论-求解系统的状态转移矩阵与输出响应
(彩蛋)状态转移矩阵的求解-速解技巧
求解一阶线性常系数微分方程组——矩阵对角化
《现代控制理论》1-5章分题型讲解速成课
《每日一题》现代控制理论中已知状态转移矩阵,怎么求出系统矩阵?
现代控制理论-李雅普诺夫能量法的应用
现代控制理论-状态反馈极点配置问题
状态观测器与状态反馈矩阵的联合画法及意义
指纹练题5 约当标准型 由传递函数的状态空间实现 含有重根的留数法 现代控制理论 考研控制 自动化
现代控制理论-根据系统微分方程列写状态空间表达式
你必学会,只讲最有用的【现代控制】!(持续更新中)
极点配置 系统镇定 渐近稳定 状态反馈 闭环极点 系统矩阵的特征根 考研控制 自动化
现代控制理论-离散系统的状态空间表达式的列写
现代控制理论-状态空间方程的非齐次解
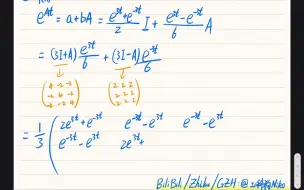
【速成】计算矩阵指数函数eAt
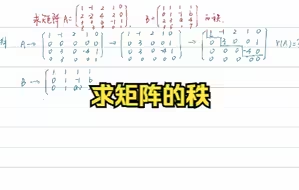
求矩阵的秩
线性系统理论—状态方程化为可控标准型
状态观测器 全维观测器 降维观测器 现代控制理论 考研控制 自动化
[现代控制理论][期末][习题课]1 状态空间的对角标准化
现代控制理论-状态空间表达式的离散化方法
线性系统理论—将动态方程变换为对角型
广义特征向量 约旦标准型 约当标准型 现代控制理论 考研控制 自动化
现代控制理论-李雅普诺夫稳定性和渐进稳定性以及BIBO稳定性的分析