V
主页
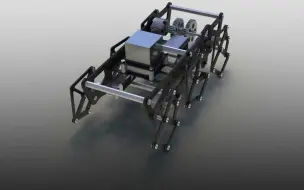
可反向驱动冗余(6+3)自由度混合并联机器人第1部分:轨迹控制
发布人
https://www.youtube.com/watch?v=hW3KpAY30p0 这段视频演示了一种新型的后驱动冗余(6+3)自由度空间混合并联机器人的操作。这个机器人有一个非常大的平移和定向工作空间。冗余是用来完全缓解奇异性和操作夹具,而不必安装在移动平台上的任何执行机构。如视频的最后一部分所示,并行混合体系结构产生高动态能力。 (棒读) 拉瓦尔大学机器人实验室:https://robot.gmc.ulaval.ca/en/home/
打开封面
下载高清视频
观看高清视频
视频下载器
AGV数字孪生-西门子plant simulation软件
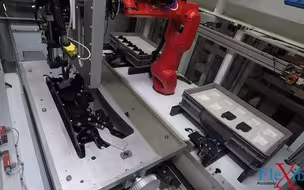
全自动化装配生产线
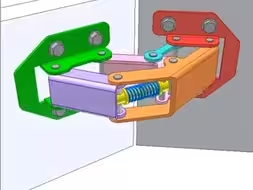
第382期 机械原理基础-隐藏铰链
李飞飞在斯坦福大学与尤瓦尔·赫拉利顶级对话
未来精益机翼工厂使用3D EXPERIENCE仿真模拟
研究生要记好了,一个连导师看了也佩服的网站!!!
ok 以后不用为谁干家务吵架了!
我发现:学机械专业废掉的人都有一个共性...
德国宇航中心DLR-自动化飞机装配
西门子-为什么数字孪生将会是未来工业支柱
大型飞机部件碳纤维增强复合材料高度自动化柔性化加工
我从来不用自己剪视频,因为我会用AI
机械工程师必备知识:凸轮分割器及电机的选型计算
西门子-数字化制造
第386期 机械原理基础-120度六连杆隐藏式铰链
机器人悬挂设计
QA Platform 4.0-下一代质量控制
所有学机械的这本书请给我啃到烂,机械设计人人手一本!想拿高薪想成为机械工程师,这本书必看!
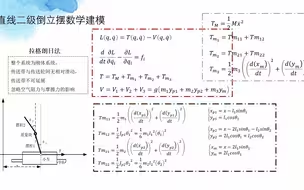
现代控制工程大作业PPT展示
122集付费!CNN、RNN、GAN、GNN、DQN、Transformer、LSTM等八大深度学习神经网络一口气全部学完!
【教程】40分钟教你自制自动驾驶智能车
重型机械 | 世界上最令人惊叹的 60 台重型机械
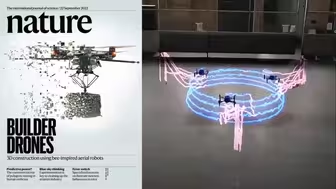
Nature | 像蜜蜂筑巢一样 多无人机协同进行航空增 材制造,实现高精度3D打印
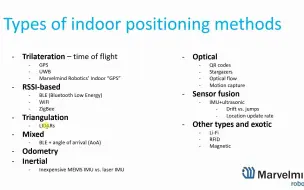
室内定位技术综述
机械专业真的是理工科最烂专业吗?要不要转专业呢?
龙信自动钻铆机器人
微信关键字自动回复,无占用,无延迟,秒回,指定群聊监控,私信监控,智能回复机器人,进阶版
优傲机器人在精密光学制造中的自动化质量控制
4个逆天AI工具 以后将会毫无秘密可言 读唇语的Ai 模仿你的字体 数字人驱动 #ai #ai工具 #干货分享
展示视频
【全168集】强推!2024最细SolidWorks全套教程,别再走弯路了,逼自己一个月学完,从0基础小白到SolidWorks大神只要这套就够了!!
导师推荐的数据库!可检索1.7亿文献资源!文献综述一天就能搞完!
质量提升相关讲座
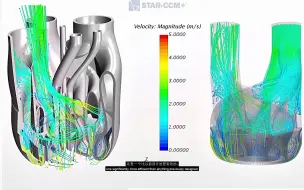
FAST-LIVO2: 高效鲁棒的激光雷达-惯性-视觉融合算法,可用于实时高精度三维重建,无人机和机器人在退化场景的机载定位。
都劝退机械,那中国的机械还怎么发展?难不成中国制造已经面临重大危机?!
提升代码能力!直接抄她的代码,就是最好的学习方法
V-Core 4 IDEX 升级 - 刚刚发布! | V-Core 4 IDEX Upgrade - Just released!
姑娘们要嫁就嫁机械工程师人稳、心善、能挣...
Aloha-ACT 在单臂上模仿学习仿真系统(基于Coppliasim+RLBench)