V
主页
京东 11.11 红包
Nature | 像蜜蜂筑巢一样 多无人机协同进行航空增 材制造,实现高精度3D打印
发布人
英国帝国理工学院的研究人员在《自然》杂志上发表的论文中,介绍了一种多无人机协同3D打印技术。该技术通过无人机精确堆砌轻质水泥材料,建造出误差仅5毫米的结构。这一创新方法不仅提高了建筑效率,还为在极端环境下的建筑提供了新思路。尽管目前无人机的载重和续航能力有限,但研究团队正通过自动化充电和精确定位系统来解决这些问题,以期未来在建筑行业实现广泛应用。 标题:Aerial additive manufacturing with multiple autonomous robots 链接:https://www.nature.com/articles/s41586-022-04988-4
打开封面
下载高清视频
观看高清视频
视频下载器
AutoFusion - 无人机集群协同自主定位与实时地图重建
IROS'24 南开大学 | 通过动态拓扑图上的Voronoi划分实现快速且通信高效的多无人机探索
Nature | 颠覆传统设计!电动液压肌肉骨骼机器人腿,实现真正意义上的灵活、强适应性的且节能运动!
沉浸式体验大疆neo自动跟拍熊孩子,这样的表现满意吗?
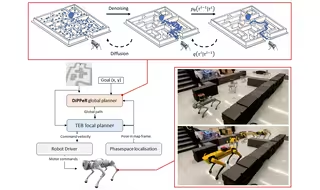
[ICRA 2024] DiPPeR: Diffusion-based 2D Path Planner applied on Legged Robots
EPIC:轻量级LiDAR无人机探索框架
就一个电机也能上天入地?【科普三分钟最终版本】
毕业作品:陆空两栖无人机
RACER: 多无人机协作快速探索 IEEE TRO Best Paper
IROS'24 普渡大学、麻省理工学院 | 5自由度触觉夹持器,性能匹敌仿生手,实现高效精确操控
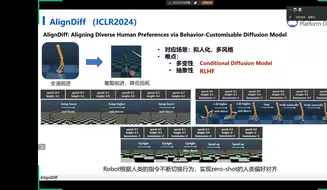
Diffusion Models for Decision Making, THU FuRoC 机器人小讲堂第三讲
离职DJI纪念
哈佛大学Nature多材料螺旋3D打印新进展
聊一聊为什么我能发Nature?——关于我发Nature的那些事
ECCV'24 Oral | MVSplat:从稀疏多视图图像中实现高效的3DGS,用更少的参数,速度快2倍,还能跨数据集泛化
最新研究成果!FZMotion助力哈工大高会军教授、李湛副教授团队新型矢量旋翼飞行器研发,悬停间轻松“拧” 亮未来!
仅4.21克!我国研发出太阳能动力微型无人机
当机器人遇到遮挡:IROS'24最新佳作揭秘「如何在视觉盲区保持精准人体追踪
ACM SIGGRAPH Asia 2024 | RobotMDM:机器人运动扩散模型:机器人角色的运动生成
机器人顶级期刊T R O创刊至今首篇全华班Best paper诞生。一种利用分布式无人机机队进行快速协作探索的方法RACER获得Best paper。
美国Moore刮研技法。
贺建奎:“愿意发表自己2篇基因编辑婴儿论文,但必须发在Nature或Science上”
赛博仙女棒研发成功
浙大Science Robotics封面 全自主微型飞行机器人集群
哈工大逆天高科技乐跑
降低机器人成本,清华大学推出4电机驱动9个关节的多指灵巧手
3D打印有多强大?来看集成大量复杂结构的摩方
o1编码能力已经超过99.83%的程序员
前所未有的体验,上海交大教授的Tony老师,机器人为他刮胡子
Science Robotics | 无需外部传感器,通过关节力矩传感技术即可实现"触摸即命令"
这就是对地!-2024cuadc备赛
红翼前锋三维穿墙雷达、自走侦查球、战斗机器狗、动力外骨骼协同演练~
和日本女生领证结婚了,他要改名字跟我姓
宇树科技王兴兴曾,坚决反对做人形机器人!”已经发布过两款人形机器人在某种程度上,无论是硬件还是软件的发展节奏,都超过我自己的预计“。
《Nature》的研究过程是什么样的?差点放弃?
酷!哈工大高会军教授、李湛副教授团队研发出新型矢量飞行机器人
浙江大学 FAST-Lab 2021代表性研究成果 | 空中机器人 | 人工智能 | 集群机器人 | 自主导航
ECCV'24 oral | DVLO,首个基于深度聚类的多模态融合,双向结构对齐的融合网络新SOTA
Research | 受章鱼行为启发 的具有爬行和游泳能力的可脱 离机械臂工作的水下软体抓手
ECCV'24 Oral 满分论文 | SpikeYOLO:脉冲神经网络新进展,引领高能低耗目标检测新纪元