V
主页
京东 11.11 红包
控制理论实验1--概述
发布人
https://www.youtube.com/watch?v=YiJRgKJ0My8&list=PLUMWjy5jgHK10pwEsKunQ3g28zYnEEr91&index=2 学就完了
打开封面
下载高清视频
观看高清视频
视频下载器
控制理论实验3--小车控制举例
控制理论实验5--如何读懂陀螺仪的数据表Part2
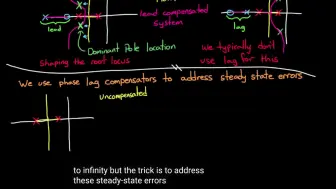
【Brian Douglas】经典控制理论----超前滞后补偿器设计,高能(英语配英文字幕)
【工程中的控制系统-Part 5】理解陷波滤波器(Notch Filter)【英文字幕】
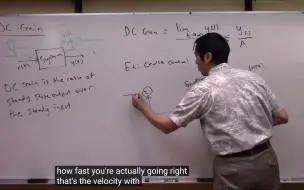
【好到扣脚系列控制理论讲解】7:直流增益
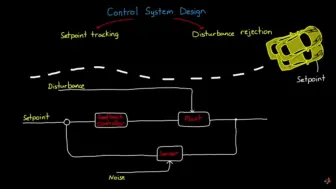
【工程中的控制系统-Part 3】什么是前馈(Feedforward)【英文字幕】
【好到扣脚系列控制理论讲解】9:伯德图简介
【传感器融合】2:如何融合磁力计,加速度计和陀螺仪
【好到扣脚系列控制理论讲解】10:动态系统的谐振频率
关于相位裕度,增益裕度和系统灵敏度的理解
控制理论实验7--一种简单的建模方法
【好到扣脚系列控制理论讲解】8:动态系统的带宽
【好到扣脚系列控制理论讲解】11:理解和手画伯德图
【好到扣脚系列控制理论讲解】6:利用Matlab进行控制系统的时域分析
【工程中的控制系统-Part 7】代码生成的四种方法【英文字幕】
【工程中的控制系统-Part 4】时间延时的影响 (Time Delay)【英文字幕】
好到扣脚系列控制理论讲解】20:用根轨迹的方法设计PID控制器
【好到扣脚系列控制理论讲解】14:用Matlab分析根轨迹
【好到扣脚系列控制理论讲解】17: 利用根轨迹设计控制器
控制理论实验6--Matlab/Simulink一个简单的MEMS陀螺仪模型
【伯德图-5】:徒手画伯德图--共轭极点
【好到扣脚系列控制理论讲解】5:超调量,调节时间以及其他性能指标的推导
【好到扣脚系列控制理论讲解】15:劳斯判据
【好到扣脚系列控制理论讲解】18:利用齐格勒-尼科尔斯方法设计PID控制器
【根轨迹-2】:手绘根轨迹-part1
【好到扣脚系列控制理论讲解】15:劳斯判据(有声版)
【根轨迹-5】:利用Matlab更好的理解根轨迹
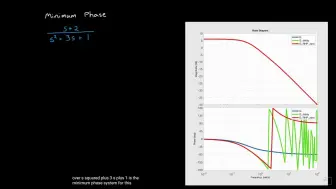
【工程中的控制系统-Part 6】非最小相位系统(Non-Minimum Phase Systems)【英文字幕】
【鲁棒控制】:5 H无穷和Mu综合
【神偷奶爸4】格鲁重出江湖,超级小黄人重磅亮相!
【传感器融合】1:什么是传感器融合
【伯德图-1】:频率响应介绍
【神偷奶爸4】中文版
【浅谈状态空间-4】:LQR控制
Nyquist稳定判据--part1
利用最优化惩罚方法求解动态系统方程
【寂静之地2】屏住呼吸,不要出声!
【海绵宝宝:营救大冒险】小蜗被绑架?营救启动!
【工程中的控制系统-Part 8】 The Gang of Six in Control Theory【英文字幕】
【伯德图-2】:徒手画伯德图--常数增益