V
主页
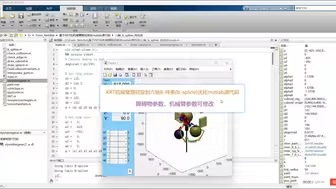
基于人工势场法的机械臂避障
发布人
基于人工势场法的机械臂避障 matlab代码 适合初学路径规划算法
打开封面
下载高清视频
观看高清视频
视频下载器
六自由度机械臂正逆解UR5机械臂仿真和代码
半桥LLC参数计算设计书(Mathcad)(含变压器开关管等器件选型)
RRT路径规划机械臂六轴B-样条(b-spline)优化matlab代码
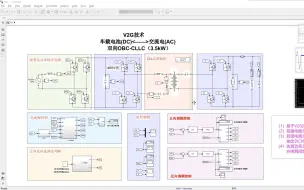
基于V2G技术的双向AC/DC和DC/DC充放电机OBC电动汽充电桩充放电接入交流电 (正向PFC+CLLC,反向并网+CLLC)
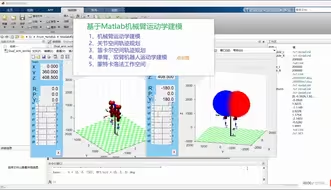
机械臂运动学建模关节空间笛卡尔空间蒙特卡洛法工作空间
单相光伏储能并网PQ控制离网恒压恒频控制并离网切换含笔记和建模资料
二自由度机器人RBF网络自适应滑模控制
发电厂课设-110kV变电站电气一次部分
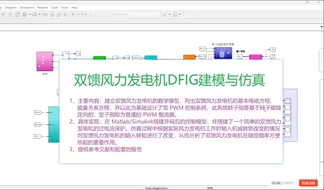
双馈风力发电机DFIG建模与仿真(含建模文档)
【S型速度轨迹规划】六自由度机械臂
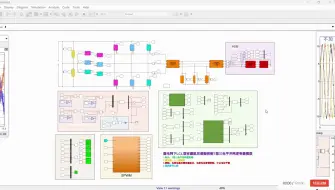
光储充+三相并网交直流系统(一)(带电池负载) 基于Matlab/simulink光储充交直流并网仿真(光伏储能充电桩交直流系统)可孤岛运行可并网运行
RRT星(RRT-star)机械臂轨迹避障末端拟合轨迹算法+三次b样条优化路径拟合
基于DSP28335单相全桥逆变入门程序学习
基于RRT路径规划算法及梯形速度规划六自由度机械臂避障代码
22节点短路计算课程设计Matlab程序(包括三相对称故障和不对称故障)
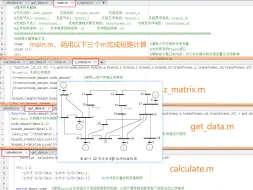
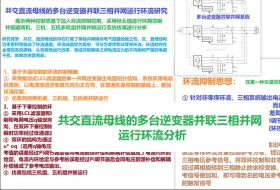
共交直流母线的多台三相逆变器并联并网运行环流抑制研究(共五个仿真进行分析)
【网盘自取】电机控制软件设计和硬件设计解析文档资料
基于DSP28335单相逆变程序多功能版本
全桥LLC参数计算设计书(Mathcad)(含变压器开关管等器件选型)
弱电网下LCL型有源阻尼谐振抑制T型三电平并网逆变器模型
基于拓展卡尔曼滤波EKF的永磁同步电机参数辨识
全桥LLC调频加移相混合调制(PFM+PSM)小功率低纹波
基于非线性干扰观测器的机械臂自适应反演滑模控制
基于VSG控制(虚拟同步发电机控制)的模块化多电平变流器MMC
【混合调制】基于Plecs全桥双向CLLLC谐振变换器调频+移相混合调制仿真(二)
六自由度机械臂正运动学和逆运动学理论分析及程序
基于Matlab六自由度机械臂正逆运动学及动力学分析
Buck变换器Mathcad计算书(包括损耗计效率温升电感计算电容开关管选型)
双向无线电能传输(BD-WPT)
基于DSP28335光伏并网逆变器源代码原理图PCB方案
光伏MPPT控制(恒压法、电导增量法和扰动观察法)
三电平LLC移相+调频(PFM+PSM)混合调制宽输出三种调制
永磁同步电机控制谐波注入抑制5和7次谐波SVPWM调制改善电流
RRT算法路径规划六自由度机械臂Matlab程序
【一区论文复现】自适应强化学习机械臂控制
锂电池等效模型二阶RC戴维南模型
双容水箱自适应模糊PID控制Matlab程序(含报告)
电池均衡储能蓄电池充放电均衡控制SOC均衡下垂控制充放电(三组电池)
基于Psim单相Boost PFC+全桥LLC仿真及设计资料
光伏MPPT控制模糊控制算法