V
主页
基于RRT路径规划算法及梯形速度规划六自由度机械臂避障代码
发布人
基于RRT路径规划算法及梯形速度规划六自由度机械臂避障代码 1、经RRT算法规划路径 2、绘制关节角度变化曲线、关节速度曲线 3、实现机械臂避障动图展示 4、代码有注释
打开封面
下载高清视频
观看高清视频
视频下载器
RRT星(RRT-star)机械臂轨迹避障末端拟合轨迹算法+三次b样条优化路径拟合
机械臂运动学建模关节空间笛卡尔空间蒙特卡洛法工作空间
基于人工势场法的机械臂避障
基于非线性干扰观测器的机械臂自适应反演滑模控制
RRT路径规划机械臂六轴B-样条(b-spline)优化matlab代码
【一区论文复现】自适应强化学习机械臂控制
2D Fast-Planner+MPC跟踪+Perception Aware
[复现]基于MPC模型预测控制水下机器人AUV路径规划及轨迹跟踪仿真
EM Planner is all u need?
IEEE顶刊:水下机器人AUV路径规划和MPC模型预测控制跟踪控制(复现)
IEEE'24 | 最小成本!安全协作!异构无人机飞行的路径规划新策略!
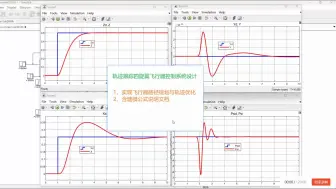
轨迹跟踪四旋翼飞行器控制系统设计
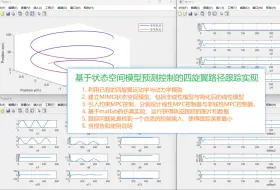
基于状态空间模型预测控制的四旋翼路径跟踪实现
241一分钟搞定定义障碍物和起止点坐标的Dijkstra 算法路径规划
感应电机无速度传感器FOC控制异步电机无速度传感器矢量控制
基于stm32低压无感BLDC方波控制方案(代码+原理图)
【复现】光伏并网逆变器接入弱电网的序阻抗建模扫频法与稳定性分析
Simulink和m代码_实现粒子群算法对PID 控制参数优化自动调节自整定
MPC-VSG模型预测控制和虚拟同步机控制并网逆变器
基于MATLAB机械臂自适应模糊滑模控制仿真多种控制比较
基于地形的路径规划案例
多障碍物联合预测!理论全搞定~
【论文复现】基于超局部扩展状态观测器和无模型预测电流控制的内置式永磁同步电机IPMSM仿真
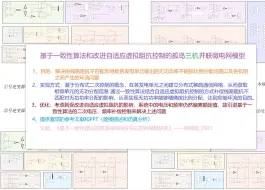
【三机】基于一致性算法和改进自适应虚拟阻抗控制的孤岛三机并联微电网模型(复现)
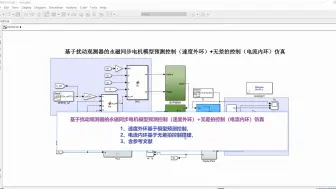
基于降阶龙伯格扰动观测器的永磁同步电机模型预测控制(速度外环)+无差拍控制(电流内环)仿真
单相交错并联图腾柱PFC+全桥LLC谐振变换器AC-DC交直流电能转换Matlab仿真设计
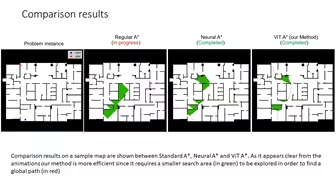
[Humanoid 2023] ViT A*: Legged Robot Path Planning using Vision Transformer A*
01_案例展示
含线性死区补偿的PMSM矢量控制FOC算法双闭环仿真
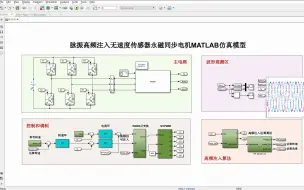
内置式永磁同步电机脉振高频正弦注入无速度传感器模型采用转速外环电流内环控制含高频注入算法
基于双PWM整流器的飞轮储能系统建模
路面不平度时域模型+非线性空气主动悬架
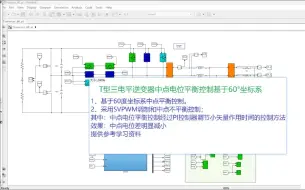
T型三电平逆变器中点电位平衡控制基于60°坐标系(含算法文档和参考文献)
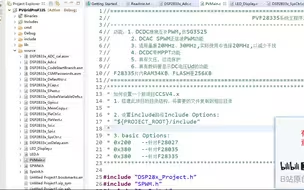
基于DSP28335光伏并网逆变器源代码原理图PCB方案
双向储能逆变方案代码及PCB原理图48V-2000W
永磁同步电机模型预测电流控制双矢量改进(电流环)+滑模控制(速度环,新型趋近律与扰动观测器结合)
基于EKF扩展卡尔曼滤波算法的永磁同步电机PMSM无传感器矢量控制
【一区论文复现】微电网分布式预测控制和二次控制及通信延时研究
HFI高频注入+增强型滑膜eSMO代码全源码非库,附带解析文档
永磁同步电机IPMSM高频方波信号注入法的无位置传感器控制