V
主页
京东 11.11 红包
7.符号IO域和变量指针化
发布人
打开封面
下载高清视频
观看高清视频
视频下载器
6.IO域组态
1.3西门子博图简单气缸控制触摸屏画面并进行仿真
5.2触摸屏案例1:小车直线运动PLC编程
4.3按钮组态_文本_设置变量
常用IO指令应用
机器视觉案例_欧姆龙视觉软件part1
工业机器人操作与运维_空压机的基本操作
通过触摸屏控制机器人启停功能编程与调试
1.1硬件组态
5.3触摸屏案例1:小车直线运动_仿真调试
工业机器人操作与运维_吸盘的IO配置
10.1报警组态_报警变量和报警事件
3库的使用
1.2西门子1200plc创建一个简单气缸控制程序并进行仿真调试
2.组态通信与下载用户程序
12.2进阶版电机正反转控制PLC与HMI设计综合应用案例
8.2开关组态_库开关控制电机仿真
运动控制:信捷触摸屏控制伺服电机定位控制程序设计案例讲解
工业机器人操作与运维_气爪和快换的IO配置
PLC与ABB机器人IO通讯综合应用_2PLC和HMI编程
11.3用户管理_综合应用
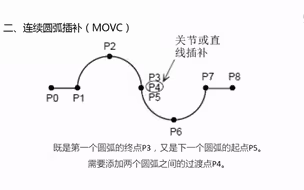
安川机器人圆弧指令编程
9.1棒图组态
工业机器人操作与运维_电磁阀手动操作
4.2按钮组态_加减变量按钮
2.1基本对象(文本、图形、图片)
HMI、PLC和机器人通讯综合应用_3机器人部分编程
2.1基本对象(文本、图形、图片)
机器人及周边设备编程与调试part1
机器视觉案例_欧姆龙视觉软件设置part2
带参数的例行程序a_组输出信号配置
信捷PLC控制步进定位控制与编码器应用
机器视觉案例_ABB机器人与欧姆龙视觉通讯part4
四点法定义吸盘工具坐标数据
机器视觉案例_ABB机器人与欧姆龙视觉通讯part3
PLC与ABB机器人IO通讯综合应用_2PLC和HMI编程
西门子触摸屏操控ABB机器人暂停/继续——机器人中断指令应用
工业机器人集成应用_伺服轴配置
工业机器人集成应用_第7轴相关IO配置功能测试
9.2量表组态