V
主页
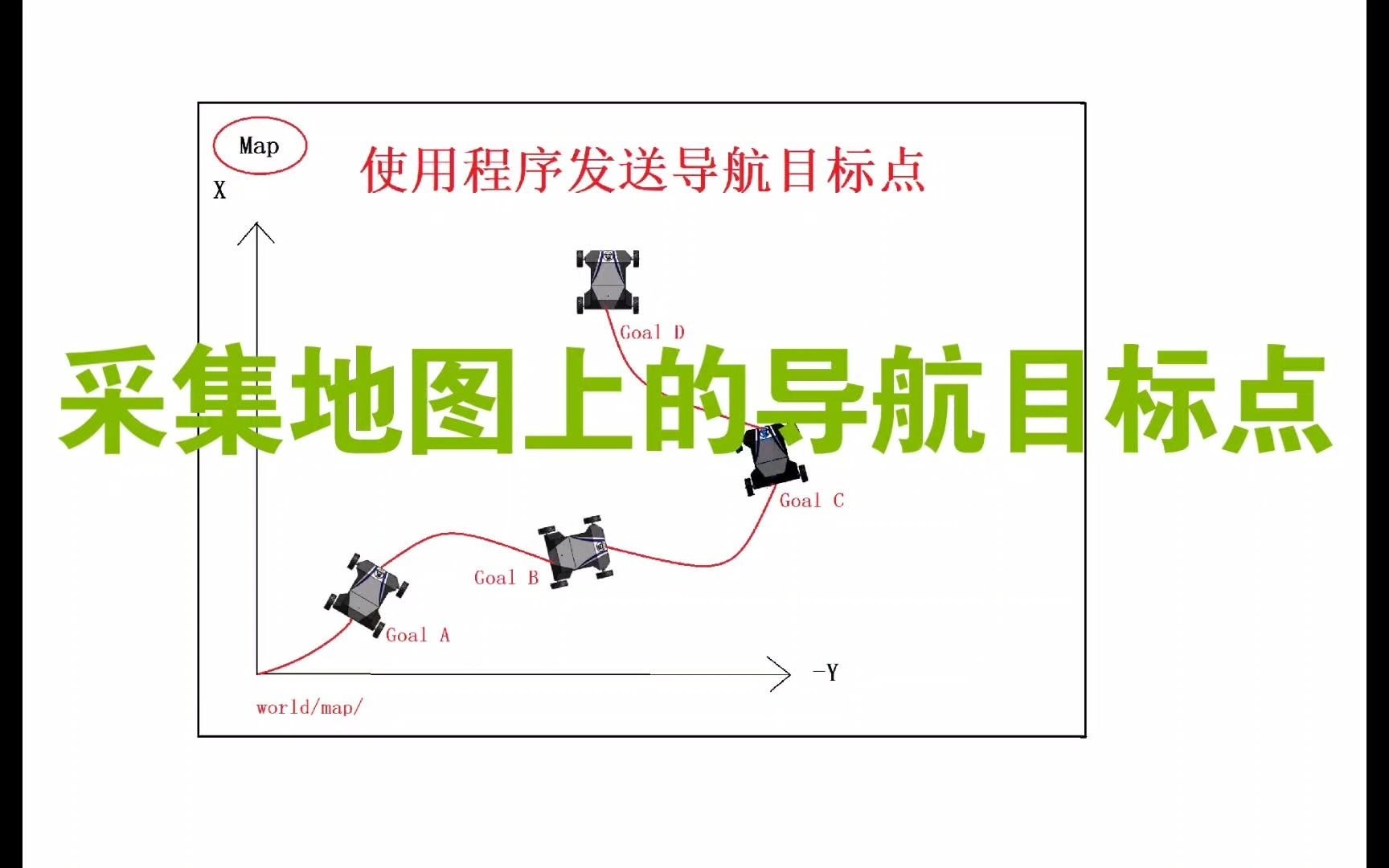
搭建ROS机器人之采集地图上的导航目标点
发布人
详细过程:https://mp.weixin.qq.com/s/w88OYbfeRQcYfQ4Gg6X7VQ 关注公众号(搜索:COONEO),看详细图文视频过程及代码链接并可进交流群一起学习、分享、交流。
打开封面
下载高清视频
观看高清视频
视频下载器
搭建ROS机器人之用程序发布导航目标点
搭建ROS机器人之用Python发布导航目标点
开源!手把手教你搭建Arduino+树莓派的ROS小车之一 启动系统连接WIFI
ROS机器人基于gmapping的slam自动导航建图!
搭建ROS机器人之——手把手教你用gmapping实现2D建图
差速ROS小车调试之激光雷达建图&导航
手把手教你Velodyne Lidar仿真+3D建图之激光雷达建图
ROS2自动驾驶|边做边学(二)地图与定位
自制ros建图导航机器人2
【SLAM-2024】第五届全国SLAM技术论坛-浙江大学-高飞-自主飞行集群的感知与定位
ROS机器人激光雷达2D建图方法总览之rf2o激光里程计gmapping建图对比二
《松灵ROS 2开讲啦》第六期 Nav2导航应用
开源!Webots+ABB机械臂逆运动学解算之如何打开Webots的示例工程
开源!手把手教你多路超声波传感器避障仿真
ROS 颜色目标跟随的 Python 实现
开源!手把手教你搭建Arduino+树莓派的ROS小车之四 Navigation
ROS小车调试之串口绑定, IMU、Lidar、超声波可视化及电机控制
ROS 颜色目标识别与定位的 Python 实现
2025年 物流搬运机器人 树莓派开机自启动程序
《ROS自主无人机:从理论到实践》首期训练营 自主定位| 场景重建| 规划导航
路径平滑|基于共轭梯度法的轨迹优化(ROS C++/Python)
ROS 相机图像获取的 Python 实现
手把手教你Velodyne Lidar仿真+3D建图之激光雷达数据录制
基于yolo和moveit的图像识别机械臂目标抓取搬移
2025年工创赛 物流搬运机器人 全流程调试
基于ROS双臂协同的智能物流搬运系统
2025工创赛物流搬运机器人 赛事解读与问题分析2
Arduino调试PID参数过程记录
B站水友开发的免费ChatGPT账号共享站,打开即用
开源!手把手教你搭建Arduino+英伟达Jetson的ROS小车(上)
ROS 人脸检测的 Python 实现
2025工创赛物流搬运机器人规则分析与备赛计划
仅需一步,瞬间提升树莓派5的AI算力,化身性能猛兽!
ECCV'24 | 无图定位新突破!从低精地图到使用全景-BEV联合检索网络进行跨视图图像地理定位。
草履虫都能学会!这可能是B站最全的(Python+机器学习+深度学习)系列课程了,入门巨简单学不会你打我!机器学习/深度学习/人工智能/python学习
CVPR'24开源 | 吊打一切VINS!又快又好的视觉惯性导航系统!
开源!手把手教你搭建Arduino+树莓派的ROS小车之二 主从机网络配置
2025工创赛物流搬运机器人 如何码垛 如何启动 注意什么??
[竞赛直击]中国机器人及人工智能微型无人机-国一客户案例-Phoenix330
套件教程-RTABMap之3D雷达定位与导航