V
主页
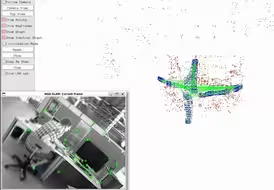
【SLAM-2024】第五届全国SLAM技术论坛-浙江大学-高飞-自主飞行集群的感知与定位
发布人
【SLAM-2024】第五届全国SLAM技术论坛-浙江大学-高飞-自主飞行集群的感知与定位
打开封面
下载高清视频
观看高清视频
视频下载器
无人机系统 - 高飞组超全讲解!
我和我飞导【浙江大学FAST Lab】
搞SLAM算法还有前途吗
【浙江大学】浙大博导带你从0制作无人机
30岁,我在浙江大学当教授【ME32】
【高翔】视觉SLAM十四讲
无人机系统 - 高飞组超全讲解!2021ROS暑期学校 第五天精剪回放
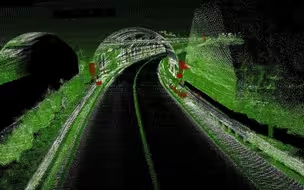
SLAM高速路/隧道建图
机器人顶级期刊T R O创刊至今首篇全华班Best paper诞生。一种利用分布式无人机机队进行快速协作探索的方法RACER获得Best paper。
egoplanner自主起飞,vins定位。为什么起飞会飘啊啊啊啊啊
什么是SLAM
无人机定位与导航
高翔SLAM报告:开阔高动态区域的激光融合定位
大三菜鸡毕设:无需GPU即可实时的高精度动态SLAM[开源]
CU-Astro自主探索无人机室内外飞行演示:3.5寸紧凑型 (cuhk-usr-group)
【完结】从0制作自主空中机器人 | 开源 | 浙江大学Fast-Lab
吊打ORB3!73Hz!南洋理工重磅开源AirSLAM:无惧复杂光照的超强点线视觉SLAM!
学习SLAM无从下手?学SLAM应该怎么安排?
【推荐】第三届 全国SLAM技术论坛
浙大Science Robotics封面 全自主微型飞行机器人集群
【看代码】浙大FastLab无人机课程中的代码
fast_planner实车测试
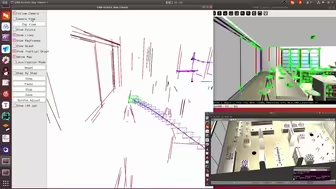
激光/视觉/IMU定位与建图 FAST_LIVO 室内2
浙大最新 Science Robotics 微眼动启发的新型事件相机
AutoFusion - 无人机集群协同自主定位与实时地图重建
mid360航点mpc导航
2025视觉组培训 第一课【导论及Linux入门】
CVPR'24开源 | 吊打一切VINS!又快又好的视觉惯性导航系统!
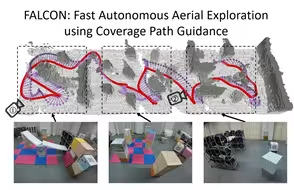
快速自主空中探索新框架:FALCON
IROS'24 南开大学 | 通过动态拓扑图上的Voronoi划分实现快速且通信高效的多无人机探索
今天来点背后的研发日常
Swarm-LIO2: 适用于无人机集群的分布式、高效激光雷达惯性里程计
小登的大创结项
[IROS 2024] AS-LIO: 空间交叠度指导的自适应滑窗激光惯性里程计
走进人工智能研究院 - 上海期智研究院
隐式扫掠体积SDF:任意形状机器人连续碰撞避免轨迹生成
这几年,激光雷达发展迅速,成本也下降许多,性价比就上来了
开个新项目
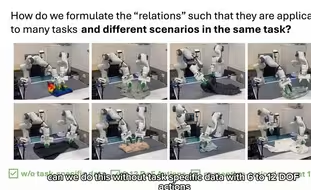
Franka Robotics 很高兴能为 Relational Keypoint Constraints 关系关键点约束系统 ReKep 的研究开发提供平台。
过于落后,可以展示(doge)