V
主页
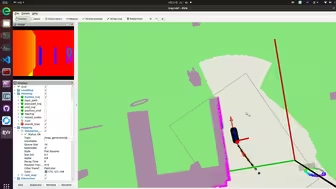
Ros机器人产品,具有Slam导航、定位、路径规划、自主避障等功能。
发布人
网络 Ros机器人产品,具有Slam导航、定位、路径规划、自主避障等功能。 (1)Ros机器人上位机和下位机开发程序; (2)教学资料;
打开封面
下载高清视频
观看高清视频
视频下载器
Ros机器人产品,具有Slam导航、定位、路径规划、自主避障等功能。----改进cartographer方案
泊车路径规划代码
基于Dijkstra算法移动机器人路径规划
b样条曲线 路径规划 轨迹规划 阿克曼转向车辆 控制
A与DWA算法融合的路径规划算法 可全局路径规划的同时静态避障
matlab路径规划代码基于A(A星)算法的路径规划
matlab上下料机器人轨迹规划
这么简单好用的 ROS 定位方法,确定不要试一下吗?!
强化学习-自动驾驶路径规划控制决策-sac的高速公路和遮挡场景训练
基于matlab实现改进的人工势场法 apf算法进行路径规划
MATLAB三次 五次 多项式 机器人机械臂轨迹规划粒子群优化
六轴机器人仿真轨迹规划姿态插补关节空间轨迹规划笛卡尔空间轨迹规划 353轨迹规划
定位语音包设置完成#导航骚气语音包 #高德地图怎么换导航声音 #导航成精
仓储巡检无人机 功能完成度较好的无人机
gazebo 路径规划 slam建图 双目单目rgbd等仿真
基于先验地图的通用激光雷达定位框架
多路口循迹,arduino循迹小车,可以循迹直角,十字路口,丁字路口,S弯,锐角等,用了8路循迹,
把玩 HybridAstar -- 双向搜索初步
路径规划|基于维诺图的路径规划算法(ROS C++/Python/Matlab实现)
并联机器人 Stewart平台仿真 matlab
sift图像拼接
ChainSLAM实时建图演示
matlab机器人,机械臂仿真,程序
火星上的SLAM 非结构环境中的飞行器建图和定位 太空机器人
arduino巡线小车循迹小车超声波 避障小车
IEEE顶刊:水下机器人AUV路径规划和MPC模型预测控制跟踪控制(复现)
轮足机器人|平衡步兵静态障碍物导航避障
IEEE'24 | 最小成本!安全协作!异构无人机飞行的路径规划新策略!
FANUC机器人Karel二次开发
未知环境在线运动规划
二自由度机械臂滑模控制
02_launch文件解读
04_PID改进讲解-1
上位机引导机械手、ABB机器人C#二次开发、PC SDK 开发项目。应用机器人喷涂或机器人搬运。
三菱FX3U与欧姆龙E5CZ温控器485通讯案例
在isaaclab中开发viplanner端到端导航
2D Fast-Planner+MPC跟踪+Perception Aware
威纶通触摸屏 配方宏指令!
一级旋转倒立摆仿真 matlab
机器人学,机械臂DH建模模型