V
主页
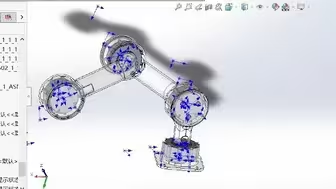
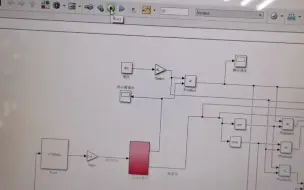
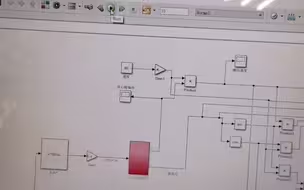
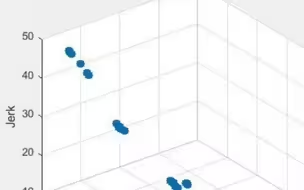
MATLAB三次 五次 多项式 机器人机械臂轨迹规划粒子群优化
发布人
三次/五次多项式机器人/机械臂轨迹规划粒子群优化代码 matlab
打开封面
下载高清视频
观看高清视频
视频下载器
走路最像人的国产机器人,真的是一股子人味。
MPC二自由度机械臂模型预测控制MATLAB
今年航展最惨的东西
如何用706.9元做一个高精度的机械臂?
当您同时拥有外骨骼和灵巧手,你就能
MATLAB仿真delta并联机器人正逆运动学工作空间仿真
MATLAB直线倒立摆一阶倒立摆LQR控制仿真
RRT机械臂轨迹避障+改进三次B样条函数路径规划Matlab仿真【六自由度】【改进DH法建模】
Dobb·E 一个开源的家庭机器人操作臂端到端学习训练框架
《关于大一新生做的抓取物体机械臂这档事》
matlab上下料机器人轨迹规划
今天把我做的这个机械臂开源
第五步-机械臂设计
微型六轴机械臂测试
四旋翼飞行器轨迹跟踪仿真控制 路径规划与轨迹MATLAB 有两篇参考文章
机械臂动作状态机演示
基于MATLAB语言的BP神经网络pid控制的S函数实现
冒死上传!这个【MATLAB神经网络和优化算法】教程!大佬带你入门!简单易懂,手把手带你走进AI人工智能世界!
赛博朋克东南大学?“CYBATHLON2024”半机械人仿生奥运会夺冠!全程回顾
南方科技大学发明的类生物四足机器人,够酷!
【机械狗五连杆丨MATLAB】运动学逆解
这种夸张的服饰反而不会受人瞩目
【MATLAB论文复现】研一研二必看!MATLAB论文如何从代码到公式完整复现?看完这个你就彻底懂了!草履虫都能学会!
盘点那些有趣的桌面机械臂13
机械臂自适应反演滑模控制(非线性干扰观测器)Matlab仿真
盘点那些有趣的桌面机械臂12
基于MATLAB的一阶倒立摆系统仿真(模型+word报告)
matlab机器人,机械臂仿真,程序
太强了!这个【MATLAB神经网络和优化算法】教程!大佬带你入门!简单易懂,手把手带你走进AI人工智能世界!
战双露娜170cm的机器人,长高了的露娜,长大了的露娜,来到现实的露娜,露娜,腿部稍微动一下
回溯法求解八皇后问题(92种解MATLAB)
基于二自由度车辆动力学模型搭建的MPC车辆五次多项式换道模型
搜维尔科技:使用CyberGlove数据手套控制机械手遥操作拿鸡蛋
基于二自由度车辆动力学模型搭建的MPC车辆五次多项式换道模型
谐波减速机械臂写字机
matlabB样条轨迹规划,7次非均匀B样条轨迹规划
人型机器人和波士顿动力机器狗结合
发那科机器人二次开发 C#读取和写入数据,可以获取点位信息。
MoveIt与Isaac Sim结合使用
单相PWM整流器(二)PR控制比例谐振控制双闭环PFC功率因数校正单位功率因数MATLAB/Simulink仿真