V
主页
京东 11.11 红包
深度学习与SLAM的结合新范式:基于轻量级CNN网络打破光流法中的光照一致性假设
发布人
视频展示了所提出的CNN与传统方法结合的混合光流法在动态光照场景下的表现,以及嵌入至VINS-Mono系统中所取得的在高动态场景下的精度提升。预印本被发布在 https://arxiv.org/abs/2310.15655 。 摘要:光流法被广泛应用于特征点的跟踪中,但灰度一致性的强假设限制了其在高动态场景(HDR)下的应用。本文采用轻量级网络提取图像中的光照鲁棒的卷积特征以及具有强不变性的角点。基于卷积特征的不变性对角点进行跟踪,不再依赖于光照不变假设,得到光照鲁棒的光流法。所提出的网络仅采用4次卷积操作,同时提取卷积特征以及角点得分图,在CPU上帧率可达190fps。由于浅层网络难以直接训练,一个深层网络被设计用于计算角点可靠性图,用于帮助特征点训练。 网络采用端到端的无监督训练模式。为了验证所提出的方法,在动态光照环境下进行了特征跟踪实验,并替换了VINS-Mono中的光流法得到更准确的视觉惯性系统。代码开源地址:https://github.com/linyicheng1/LET-NET.
打开封面
下载高清视频
观看高清视频
视频下载器
A-ORB-SLAM: ORB-SLAM2 + 光流法,得到更加鲁棒且精确的结果
3d激光定位算法测试,KITTI 自动驾驶数据集
神经网络杀疯了,登上nature:35年首次被证明具有泛化能力,能像人类一样思考!人工智能/机器学习/神经网络/深度学习/计算机视觉
【新手必看】全网最好的深度学习算法入门教程!内含CNN、RNN、GAN、LSTM等经典算法基础,赶紧收藏!
多传感器融合SLAM松耦合与紧耦合
基于先验地图的通用激光雷达定位框架
如何跑通GitHub上的项目并替换成自己的数据集再跑通呢?——人工智能|机器学习|深度学习|神经网络
SLAM为什么需要IMU
【动画解析】为什么神经网络可以学习任何东西?计算机博士精讲CNN/RNN/GAN/GNN/Transformer五大神经网络模型,深度学习入门必备!
Point_lio_gps解决LiDAR退化导致的里程计漂移。
为什么需要多传感器融合
轮式里程计激光里程计视觉里程计区别是什么
为什么神经网络可以学习任何东西?首次使用动画讲解,带你吃透神经网络!(CNN卷积神经网络、RNN循环神经网络、GAN生成式对抗网络、人工智能、AI)
强推!不愧是李飞飞,一口把深度学习、计算机视觉、神经网络、图像处理、图像分割、目标检测、物体识别给讲透了,新手小白秒上手!-人工智能/计算机视觉
2024年一个不卷但好发论文的方向:KAN结合特征提取,快来领取你的idea!
视觉惯导融合SLAM内外参标定是关键
基于ROS2的树莓派自主定位与导航小车
【对新手超级友好】三小时深度学习PyTorch快速入门教程,包教包会!!——人工智能|机器学习|深度学习
2025最好出论文的方向:结合图神经网络GNN构建局部特征!50集理论基础+创新点讲解,学会轻松发SCI!(AI人工智能丨机器学习丨深度学习丨计算机视觉丨CV)
SLAM着色点云精细建模园林石雕!
GS-LIVOM (Environment Guideline)
SLAM算法为什么需要内存管理机制
SLAM-Viewer,SLAM便捷可视化小工具
SLAM为什么需要闭环检测
机器人多传感器融合
Talk | 香港科技大学黄华健:高写实三维数字化时代下的在线同时定位和建图
SLAM系统的2种设计范式
各位国之栋梁们来花20分钟学学最新的YOLO V11目标检测模型!效果确实还算不错啊!-神经网络/深度学习/计算机视觉
【华南农业大学】激光视觉惯性SLAM建图 - 农业工程楼
铰接式车辆的运动规划
为什么大学计算机全是深度学习?
2024最火的两个模型:Informer+LSTM两大时间序列预测模型,论文精读+代码复现,通俗易懂!——人工智能|AI|机器学习|深度学习
华山区大范围激光视觉惯性SLAM建图
【深度学习 搞笑教程】31 长短期记忆网络LSTM | 草履虫都能听懂 零基础入门 | 持续更新
光追技术提高了,艺术感却不如以前了。
DOM-60 为机器人带来前所未有的感知能力
苹果发布单摄SLAM算法 轻量化眼镜要来了?
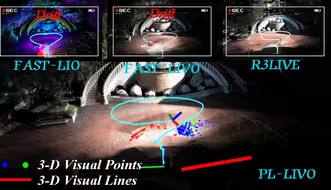
Point-line LIVO Using Patch-Based Gradient Optimization for Degenerate Scenes
草履虫都能毕业!Opencv+YOLO实时目标检测,计算机视觉方向从零到实战,带你做毕设!(计算机视觉/深度学习/Opencv/YOLO)
港科技最新SLAM数据集!SLABIM:香港科技大学主楼SLAM-BIM耦合数据集