V
主页
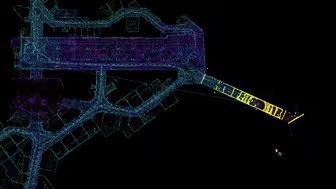
港科技最新SLAM数据集!SLABIM:香港科技大学主楼SLAM-BIM耦合数据集
发布人
现有的室内SLAM数据集主要关注机器人传感,通常缺乏建筑架构。为了解决这一差距,我们设计并构建了第一个将SLAM和BIM结合起来的数据集,名为SLABIM。该数据集提供了面向BIM和SLAM的传感器数据,两者都对香港科技大学的一座大学建筑进行了建模。为了便于使用,对设计的BIM进行了分解和转换。我们采用多传感器套件进行多会话数据收集和映射,以获得竣工模型。所有相关数据都有时间戳和组织,使用户能够有效地部署和测试。此外,我们部署了先进的方法,并报告了三个任务的实验结果:注册、定位和语义建图,展示了SLABIM的有效性和实用性。 开源链接:https://github.com/HKUST-Aerial-Robotics/SLABIM
打开封面
下载高清视频
观看高清视频
视频下载器
端到端趋势下,传统规控还有未来么?
大幅超越SuperGlue!ICCV2023最新端到端特征匹配方法
AI 挑战错觉图 51
牛津大学最新!室内室外SOTA | 用于视觉重定位的地图相对姿态回归(CVPR'24 HighLight)
最新多传感器融合数据集!Hilti SLAM Challenge Dataset(RAL-IROS 2022)
香港各大高校毕业生现状......
我的小狗开着车来接我了
2022最新!Nvidia完整阐释自动驾驶中的视觉感知(超赞技术)
500公里超大型SLAM数据集!多视觉异步SLAM系统(ICRA 2021)
牛津大学IROS2023最新!激光雷达相机外参标定新算法(大幅降低误差)
谁能想到自动驾驶最大的威胁居然是来自人为?
机械手爬行
真的超容易“搞深度学习神经网络到底怎么改代码的啊?”复旦博士教我用一本书搞定!
使用概率深度补全的3D激光雷达重建(IROS2022)
香港大学最新!ROG-Map:一种基于LiDAR的高效机器人中心占用网格地图
她不是AI,她是铃源真天慧雅美紫!
上海AI Lab最新!Depth any Video:提升深度估计的一致性以及合成更多真实带有标注的数据
低成本,但很惊艳,带16线激光雷达的自动机器人SLAM演示
港大ArcLab重磅开源LVI-GS:3DGS紧耦合LiDAR-视觉-惯性SLAM!实时照片级建图!
最新!如何使用深度强化学习在未知环境中进行导航?
多传感器标定概述(Lidar/Radar/Camera/IMU/鱼眼相机)
清华大学&英伟达 | DriveEnv-NeRF:基于NeRF实现高逼真自动驾驶场景,离线测试!
轨迹预测到底预测个啥???轨迹预测入门必备!
CVPR2022 | SHIFT:当前自动驾驶最大的多任务合成数据集(雾天/雨天/雪天,检测、分割、深度图、实例分割、光流)
香港科技最新!Contour Context:3D激光雷达回环检测和度量姿态估计的抽象结构分布(ICLR2023)
ICRA2022 | 基于图的多传感器融合在自动施工机器人一致定位中的应用
又快又准!一种基于图像表示的快速精确的LiDAR地面分割算法
KITTI SOTA!即插即用,单目3D检测中的单应性损失!(CVPR2022)
大纲一览 | 规划控制算法都在这里了!PNC今年的香饽饽!近10种规控算法与代码实现你都知道吗?
还在为数据集发愁?!带你了解自动驾驶常见数据集哪里找!
什么是端到端自动驾驶?什么是基础world model?
超逼真的数据!实时高质量渲染,用于动态城市场景建模的Street Gaussians
R3LIVE++:一个实时鲁棒的紧耦合激光雷达-惯性-视觉融合框架
透彻!特斯拉occupancy network详解
CVPR2023最新!TBP Former:BEV下以视觉为中心的自动驾驶中的联合感知和预测网络
是时候总结一下过去这一年了!看看他们在自动驾驶之心分享了什么
经验之谈,轨迹预测真正重要的是什么?
数据为王!自动驾驶开源数据体系现状与未来
一个没啥特点的工程化激光slam(某二线城市的“大型”地铁站)
BEVFusion:一个简单而鲁棒的Lidar-Camera融合框架