V
主页
京东 11.11 红包
自动控制原理,彻底搞清2种稳态误差,第3节:按输出端定义的误差求解:第2种类型:e=R-C或者e=R-Y
发布人
1、e=r-c类型的考题,有人会把这种类型归类为“误差的第3种类型”,个人觉得大可不必,因为误差的定义就2种,那么这种写法就应该分类到这2种定义里,我个人倾向于把他归类于按输出端定义。 2、本课程在理论和方法层面完善时,曾有参考胡寿松题海第3版各个考题,对于视频中出现的结构图,大家可以参考胡寿松题海第3版的3-24、28、30、38、72考题,刷题检验。
打开封面
下载高清视频
观看高清视频
视频下载器
自动控制原理,彻底搞清2种稳态误差,第2节:按输出端定义的误差求解:第1种类型!
自动控制原理,彻底搞清2种稳态误差,第1节:按输入端和按输出端的定义及其区别!
自控基础3-18=计算稳态误差的方法2:静态误差系数法-2,胡寿松自动控制原理,【小鱼老师控制课堂】
控制理论基础2024:反馈控制入门与控制系统的误差分析 - 无人驾驶碾压机,零型一型系统与稳态误差的关系,前馈控制,反馈控制,终值定理
自控基础3-17=计算稳态误差的方法2:静态误差系数法-1,胡寿松自动控制原理,【小鱼老师控制课堂】
自控基础3-16=计算稳态误差的方法1:终值定理法(万能方法),胡寿松自动控制原理【小鱼老师控制课堂】
自控基础3-19=静态误差系数法的使用条件,带有前馈的ess为0时的Gc装置求解,【小鱼老师控制课堂】
自控基础3-2=时域法的3个动态性能指标和1个稳态性能指标【胡寿松自动控制原理】
基础3-21=消除稳态误差的方法&常用的校正方式【小鱼老师控制课堂】胡寿松自动控制原理
自控基础3-20=干扰作用引起的稳态误差分析-HB【小鱼老师控制课堂】【自动控制原理】
基础4-22=法则8 根之和【自动控制原理基础课】【根轨迹】【小鱼老师控制课堂】
自动控制原理,截止频率,剪切频率,wc的快速求解方法!
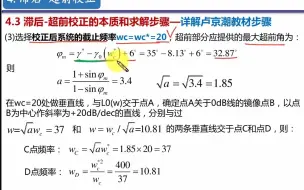
频域校正:滞后超前校正的求解步骤—作图分析法
自控基础3-8=高阶系统降为低阶系统的条件-HB;胡寿松自动控制原理,主导极点
你怎么消除干扰输入下的稳态误差?扰动点到误差信号之间,这句话怎么理解?
自控基础3-9=稳定的定义和充要条件-HB;胡寿松自动控制原理,自动化考研,控制工程考研
自控基础3-15=误差的2种定义及其区别-HB,胡寿松自动控制原理【小鱼老师控制课堂】
自动控制原理,梅逊公式在结构图中的应用:如何不重不漏的找全所有独立回路?
基础4-8=理解相角条件=方法1 向量作图法【自动控制原理基础课】【根轨迹】【小鱼老师控制课堂】
自动控制原理,绘制根轨迹的基本法则3:实轴上的根轨迹,4个例题完美展示常见考题类型!
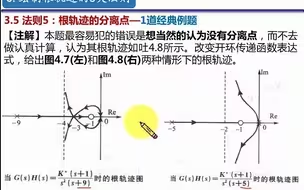
自动控制原理,根轨迹含有多个分离点时的分类讨论问题
基础4-2=开环零极点和闭环零极点之间的关系【自动控制原理基础课】【根轨迹】【小鱼老师控制课堂】
【控制考研】胡寿松自动控制原理第7版教材,第6章校正,课后题勾画+简略点评
自控基础4-18=法则6 根轨迹与虚轴交点【自动控制原理基础课】【根轨迹】【小鱼老师控制课堂】
自控基础4-13=分离点q1-定义及求解方程【自动控制原理基础课】【根轨迹】
【控制考研】胡寿松自动控制原理第7版教材:第6章校正,重难点勾画,缺失期望特性法校正内容,推荐王划一 刘胜 裴润教材做补充学习
【自控习题课9-1】胡寿松-《自动控制原理》-第七版/第八版-课后习题-精讲精炼
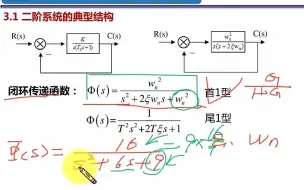
自动控制原理,二阶系统的典型结构和4种分类
自控基础3-7=高阶系统的单位阶跃响应和主导极点、偶极子的概念;胡寿松自动控制原理,主导极点
【控制考研】胡寿松自动控制原理第7版教材:第5章频域分析,重难点勾画,例题很经典,缺少三频段理论
【控制考研】胡寿松自动控制原理,第7章离散系统分析,重难点勾画
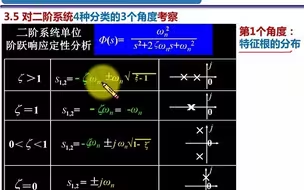
自动控制原理,时域分析,对二阶系统4种分类3个角度的考察,附等幅振荡的3种解法
自控基础课2-20=双输入双输出型结构图求传递函数,用好叠加定理,胡寿松自动控制原理,控制考研
【控制考研】胡寿松自动控制原理第7版教材:第8章非线性重难点勾画,缺失“根据相轨迹求时间解”内容
基础4-6=搞懂11道例题的角度+反正切+三角和指数表示【自动控制原理基础课】【小鱼老师控制课堂】
自控基础3-14=劳斯判据的应用:零极点对消时的处理=开环稳定和闭环稳定的关系,胡寿松自动控制原理【小鱼老师控制课堂】
控制考研数学基础,拉氏变换的应用:利用拉氏变换求解线性常微分方程
基础4-1=为什么引入根轨迹?【自动控制原理基础课】【小鱼老师控制课堂】
自控基础2-19=梅逊公式的使用条件或混合节点之间的传函怎么求?胡寿松自动控制原理,自动化考研
自控基础4-14=分离点q2-试根法-长除法求解多项式【自动控制原理基础课】【根轨迹】