V
主页
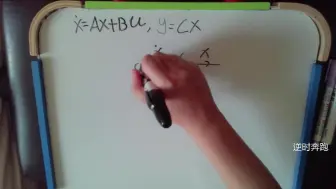
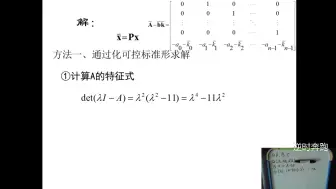
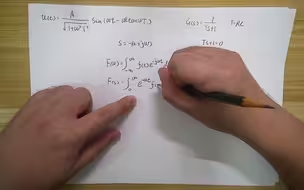
【最优控制速成5】双积分的最优时间问题求解
发布人
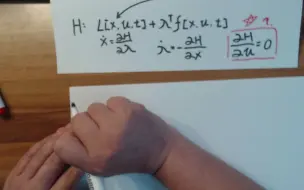
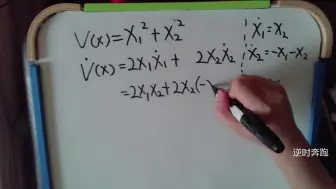
终于有一道例题了!重要的事情说三遍——你们都懂得 最优控制速成 忽略了公式的完整推导,给出了主要结论——欧拉方程+极小值原理 其中重要的是 aH/au=0的解的可实现形式与Min(H)的形式 公式推导当然重要,但是,对于优化问题,大家如果又兴趣,去看看DL的梯度方法,难度略低,但是收益更大! 2022-5 疫情居家期间 共勉
打开封面
下载高清视频
观看高清视频
视频下载器
【最优控制速成1】H方程求解静态优化问题
【最优控制速成0】最速降线问题
【最优控制速成4】极小值原理
张旭老师微积分
【最优控制速成3】变分法的H函数差别
【最优控制速成2】欧拉方程解变分问题
LQR方法 正01 基本原理
全维观测器-正01 基本原理
自律+方法+努力+坚持+时间,敢不敢花30天蜕变干掉平庸的自己!狠不下心不要进来!学习比游戏还爽个100倍?!学会这些高效学习方法论,让你效率暴涨,学到上瘾!
第313题|解积分不等式题目的5种方法常用方法|武忠祥老师每日一题
李雅普诺夫稳定性理 正04 平衡状态与求解
PID方法03 PID的计算方法
PID方法02 PID的基本思想
全维观测器-正05 观测与控制综合器
LQR方法 正02 解的存在条件
最短时间改头换面之策:五条路径任选其一的学生自助(脱沸手册 04)
八年级上学期数学经典真题,正方形中的折叠问题,利用轴对称求解
冒死上传(已离职)!学习一小时抵过十小时!目前B站最完整的高效学习方法教程!超实用学习方法,教你高效学习 逆袭就靠这个了!让你学习效率暴涨300%!
李雅普诺夫稳定性理 正01 BIBO稳定性
【北京学院-自控补习-内容3 传递函数与方框图3】20200528-162203750
初中历史课堂实录:(八上)第6课 戊戌变法
状态反馈方法 正03 状态反馈的图解形式
全维观测器-正02观测器结构
状态反馈方法 正09 全维状态反馈的综合
LQR方法 正04 综合例题与解分析
冒死上传(已离职)!学习一小时抵过十小时!目前B站最完整的高效学习方法教程!超实用学习方法,教你高效学习 逆袭就靠这个了!让你学习效率暴涨300%!
李雅普诺夫稳定性理 正10 定理的判据与实例
状态反馈方法 正05 能控性条件的证明
【根轨迹11】根轨迹与虚轴的交点
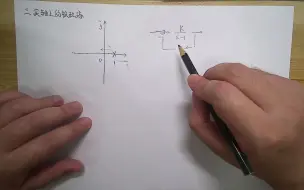
【根轨迹5+】实轴上的根轨迹例题
李雅普诺夫稳定性理 正11 判定定理的其他情况
状态反馈方法 正08 不能控性条件的例子
【频率响应12】Bode图的重要三连例题-1
【根轨迹6】根轨迹的渐近线
[ ETH RSL ] mANYpulator – 移动操纵 (Martin Wermelinger)
【频率响应3】s=jw
《马克思哲学原著选读》王德峰教授(合18讲)
【GW锁定】我的最新作品,快来一睹为快!
LQR方法 正03 状态反馈的ARE解
【根轨迹5】实轴上的根轨迹