V
主页
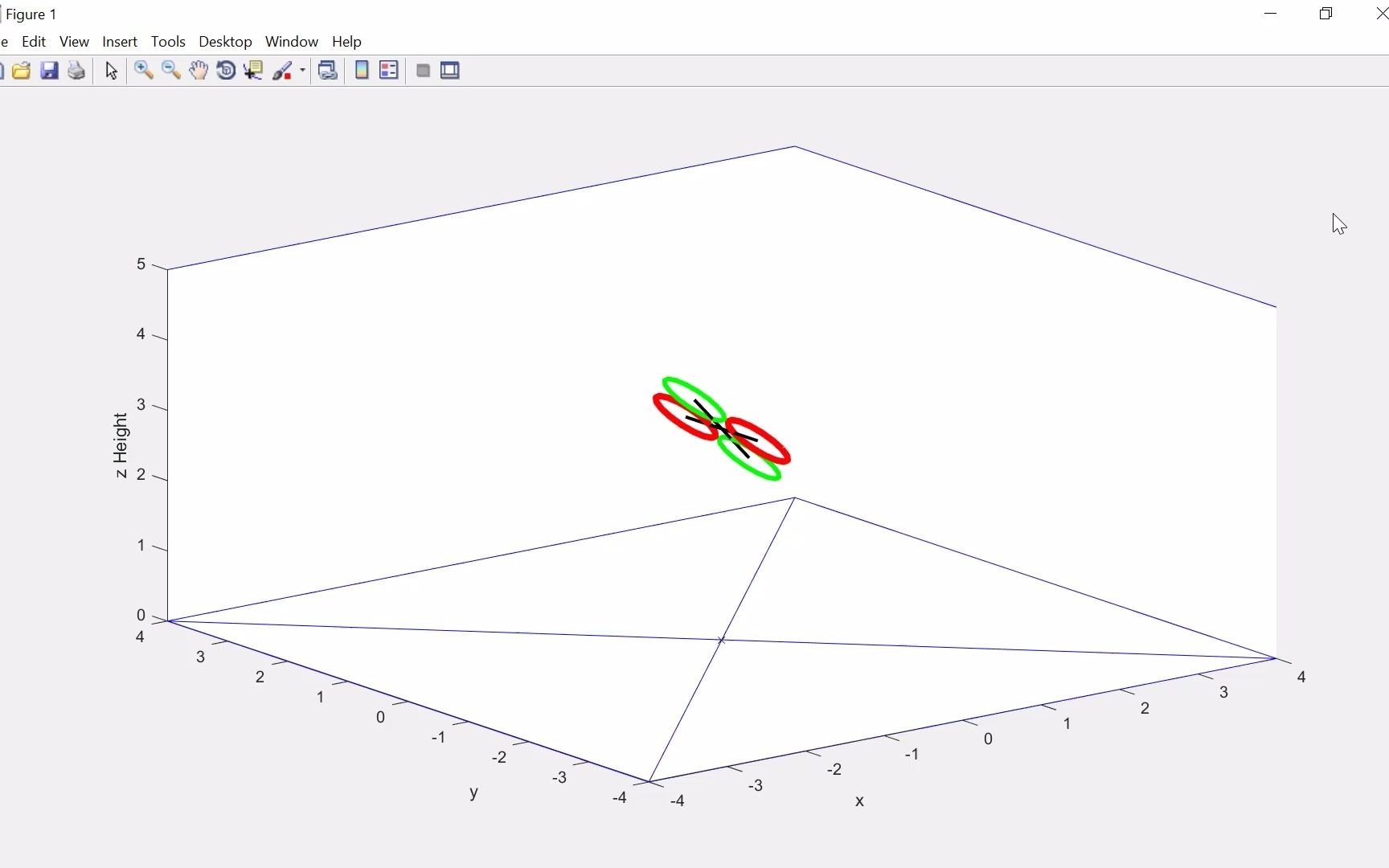
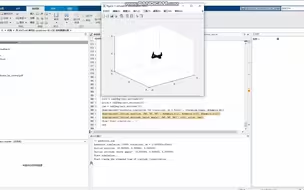
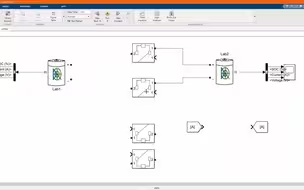
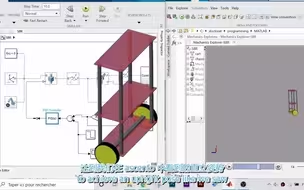
Matlab 仿真无人机四旋翼极限机动(翻转/旋转) 使用 SO(3) 和 PD 控制
发布人
打开封面
下载高清视频
观看高清视频
视频下载器
使用Simulink 3D动画可视化飞机状态
基于MATLAB/Simulink的四旋翼机模型及控制系统开发电池电机传感器控制器pid俯仰偏航
无人机四旋翼uav轨迹跟踪PID控制simulink
MPC 飞行控制设计(6-DOF 模拟) - 纵向和横向耦合matlab simulink
四轴飞行器PID开发与MATLAB仿真
基于永磁同步电机旋转高频信号注入法零低速无位置控制仿真matlab
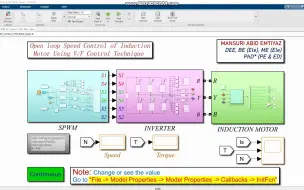
使用 VF (电压频率变换控制)技术的感应电机开环速度控制matlab simulink仿真建模
MATLAB 和 Simulink 教程 - 设计一个简单的自动驾驶仪(带飞行模拟!)
从零开始制作四旋翼无人机 EP0 - 项目整体思路介绍
OS4垂直方形路径,四旋翼仿真平台
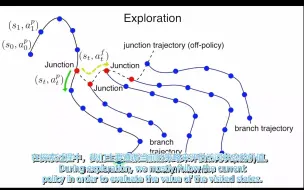
使用强化学习技术训练的神经网络控制四旋翼飞行器的方法
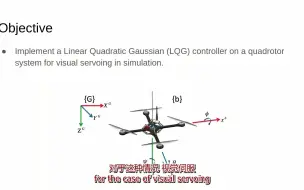
用于视觉伺服的四旋翼飞行器上线性二次高斯 (LQG) 控制器的推导、实现和响应
HTRI Xchanger软件中管壳式换热器的设计解决方案基础教程
用 MATLAB 编写的用于四旋翼飞行器的状态相关 LQR 控制器模拟器
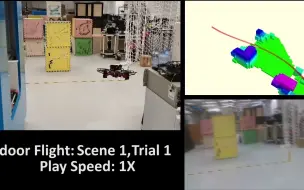
RAPTOR:用于四旋翼快速飞行的稳健且感知感知的轨迹重新规划
电池建模 Simulink 教程
从电机转矩计算车速的Simulink模型matlab
多变量 (MIMO) 控制基础:MATLAB 和 Simulink 教程
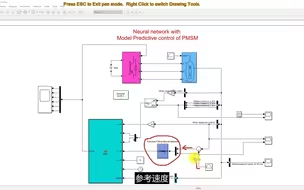
PMSM的神经网络模型预测控制/matlab
使用 SVPWM 的风能转换系统控制matlab simulink仿真建模模型
基于MATLAB 和Simulink 的飞行控制系统 在 FlightGear 上模拟
基于反步法的四旋翼滑模控制MATLAB仿真
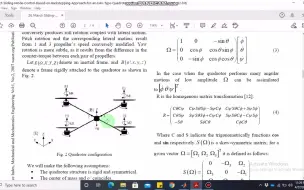
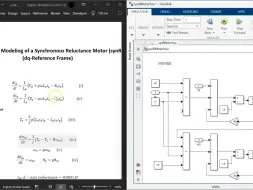
MATLAB SIMULINK同步磁阻电动机的建模与仿真
步进电机的MATLAB SIMULINK数学建模与仿真
多智能体一致性控制简单入门-一阶模型理论与一致性控制仿真
基于MATLAB SIMULINK的电池管理系统BMS热管理
电动汽车到电网 (EV2G) 系统的设计与仿真_使用 MATLAB 动力传动系统模块集 无字幕
dq坐标系下逆变器(DC/AC)并网的simulink仿真(含前馈解耦,接上个视频从零开始)
Matlab & Fluent 联合仿真--批量计算不同马赫数和迎角下的2D翼型的升阻力系数
使用 MATLAB 简化 3D 动画 - 可视化飞行测试数据和仿真结果
MATLAB-Simulink中基于充电状态对电池充放电的电池控制仿真建模模型
如何三天完成一篇毕业设计(采用Simulink仿真)
永磁同步电机LADRC速度环控制 Matlab仿真
基于PID控制和人工调谐的两轮自平衡机器人三维模型matlab simulink仿真建模
使用基于视觉的控制的动态路径跟随机器人
在 MATLAB 编辑器中设计固定翼遥控飞机
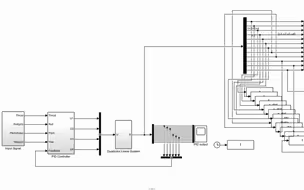
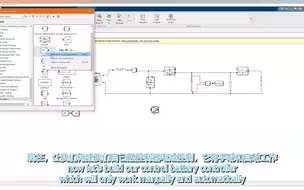
使用 MATLAB 进行电动汽车建模和仿真 | 电动汽车Matlab
研一研二实用【Matlab论文复现】,原文解读+代码复现+手推公式,一小时快速掌握!!!(matlab机器学习/matlab神经网络/人工智能)
PID与LQR四旋翼无人机控制对比matlab simulink
在 MATLAB/Simulink 中使用电池控制设计和仿真双向 DC-DC 降压和升压