V
主页
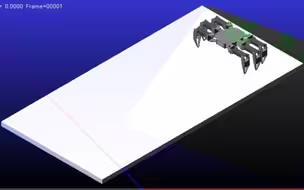
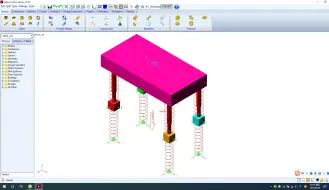
六足机器人前进、横移与原地转弯
发布人
所用模型来源于开源项目。 国外六足机器人开源项目链接: https://github.com/SmallpTsai/hexapod-v2-7697
打开封面
下载高清视频
观看高清视频
视频下载器
六足机器人三角步态前进
【开源自动驾驶小车】低成本DIY自动驾驶的智能小车
【Adams】第四讲:汽车整车模型(7自由度)动力学仿真
基于手势检测控制灵巧手【仿真】
具身智能:怎么就是人工智能下一个浪潮?
开源低成本四足机器人—Dingo
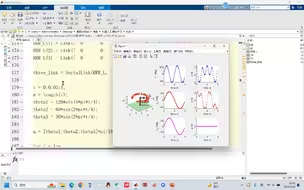
机器人工具箱-02-运动学
基于搭建的仿真Livox mid360雷达与仿真环境实现LeGO-LOAM
小可爱的飞机头机器人在争抢的时候不小心弄坏啦,胖虎帮忙维修!
双拳内置弹簧?这款毛子机甲也太帅了吧!
【Adams】第二讲:汽车单轮模型(2自由度)动力学仿真
基于yolo和moveit的图像识别机械臂目标抓取搬移
仿真模拟自学方法分享
【Adams】第三讲:汽车半车模型(4自由度)动力学仿真
托宝战士3款变形汽车机器人玩具!
【Adams】第五讲:汽车整车模型+动力总成悬置(13自由度)动力学仿真
求解器泰坦电视【一刀打开了开学的门】
Vc/Visual Components仿真 工业机器人虚拟仿真设计项目发那科机器人毯布零件加工设计 定制仿真联系福鑫机器人
【白嫖】PMSM永磁同步电机参数辨识仿真模型
FANUC法那科机器人应用
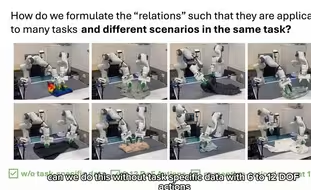
Franka Robotics 很高兴能为 Relational Keypoint Constraints 关系关键点约束系统 ReKep 的研究开发提供平台。
【CFD】烧开水2——沸腾相变换热comsol仿真
人形双足模仿学习强化学习AMP ASE Exbody求助
Robomaster哨兵motion planning仿真效果演示
Kickstarter众筹热门项目 | KT2 Kungfu Turtle,袖珍功夫机器人
源端匹配为什么比终端匹配用的多?
【SLAM-2024】第五届全国SLAM技术论坛-浙江大学-高飞-自主飞行集群的感知与定位
KISSSOFT2022渐开线圆柱齿轮副齿轮设计——第一讲:kisssoft齿轮基本几何参数输入、ISO1328GB/T10095精度选择
做了一个时速超过一百每小时的扫地机器人
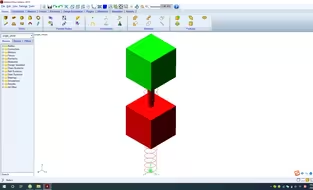
ANSYS WB 拉伸断裂仿真
机械手十万降至三万,机械设计行业现状,做机械如此艰难不如做产品,设计行业该如何选择。
IROS'24 南开大学 | 通过动态拓扑图上的Voronoi划分实现快速且通信高效的多无人机探索
【人声】SS在战区前进
机器人点位跟随产品位置变化
被国产机器人硬控三分钟:非洲记者中文寒暄,机器人双语热聊
17-Ansys LS-Dyna 气囊展开
速看,狼牙“喻见机甲”夏令营素材偷跑!
线驱机械手,机甲手指
Adams/Machinery机械传动全系列18讲:获得齿轮传动建模方法的秘密武器
追觅扫地机创新技术震撼发布