V
主页
重新思考 Transformer:在结构化矩阵的连续空间上搜索有效的线性层
发布人
https://simons.berkeley.edu/talks/andrew-gordon-wilson-new-york-university-2024-09-27
打开封面
下载高清视频
观看高清视频
视频下载器
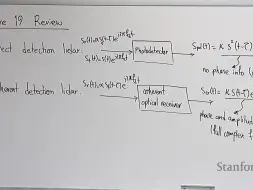
利用结构实现高效灵活的机器人接触操作
[SIGGRAPH2023]基于GPU的快速双向连续碰撞处理
可扩展的 MatMul-free
代数数论讨论班(3)—Dedekind整环中的准素分解
数据金字塔结构管理机器人数据
适用于 GenAI 工作负载的以太网结构
通过张量分解进行结构化矩阵近似
Chris Olah: 深入理解NN的可解释性
GPU.x:GPU共享
[Stanford Seminar] 重新思考艺术家所使用软件工具的power dynamics
用于近存计算的DPU加速Peta Scale存储系统
深度剖析一道来自课本的CMC代数真题
机器人控制的不同鲁棒性观点
机器人学习中的收缩理论
【线性代数】二次型在单位球面上的最大值与最小值为其矩阵的最大特征值与最小特征值
一种结构化方法来实现机器人学习泛化
Stanford EE259: 相机的工作原理与架构及成像
从物理互动中学习结构化世界模型
3D合成数据
Stanford EE259 惯性传感器:加速度计的工作原理与架构
LeftoverLocals漏洞利用GPU本地内存泄露,影响大模型数据安全
机器人空间感知基础
【代数拓扑 Math525】
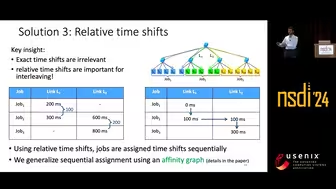
[NSDI 2024] CASSINI: ML集群中的网络感知job调度
【720P/生肉】变形金刚: 领袖的挑战 - 官方短片合集
Computer Architecture 2024,Memory Controllers:服务质量和性能 11
折纸到仿生科学
2024-2025学年秋季学期《线性代数》:行列式与矩阵
怪不得说代数几何是数学界的原神
【代数II:大学代数 Kimberly Brehm】
Stanford CS149 并行计算,数据并行 8
收敛数列的理想是什么?
Edgecore network,支持 10万级GPU节点的网络扩展方案
[APNEET2023] 超大规模RDMA:经验和未来方向
Real World Robotics Tutorial3:识别机器人的运动学和动力学
Stanford CS149 并行计算,Memory Consistency 12
DeepMind Griffin 架构
奥巴马:我们为什么要学习数学?
机器人中的数值方法
AI与3D生成