V
主页
EPIC:轻量级LiDAR无人机探索框架
发布人
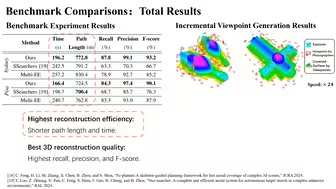
无人机自主探索是多个应用领域中的一个基本问题。近年来,基于LiDAR的探索技术因其能够生成大规模环境的高精度点云地图而备受关注。虽然点云对于导航来说信息丰富,但许多现有的探索方法仍依赖额外且通常昂贵的环境表示。这种依赖主要有两个原因:一是需要进行“边界检测”或信息增益计算,这通常依赖于占用大量内存的栅格地图;二是直接在点云上进行路径规划的计算复杂度较高,尤其是碰撞检测的成本昂贵。 为了解决这些问题,我们提出了EPIC,这是一种轻量级的基于LiDAR的无人机探索框架,能够直接利用点云数据探索大规模环境。EPIC引入了一种基于点云质量的新型观测地图,避免了对全局栅格地图的依赖,同时保留了全面的探索能力。我们还提出了一种增量式拓扑图构建方法,直接在点云上操作,使得在大规模环境中可以进行实时路径规划。 通过这些组件,我们构建了一个分层规划框架,能够生成敏捷且节能的轨迹,与大多数现有方法相比,显著减少了内存占用和计算时间。大量的模拟和真实实验表明,EPIC能够更快地完成探索任务,同时大幅减少内存消耗,与最新的技术方法相比具有明显优势。
打开封面
下载高清视频
观看高清视频
视频下载器
RACER: 多无人机协作快速探索 IEEE TRO Best Paper
快速自主空中探索新框架:FALCON
中山大学 STAR 课题组2023研究成果速览:旋翼无人机;主动感知;实时规划;移动操作;集群
具有交互意识的移动操作器自主探索
APACE:面向四旋翼无人机敏捷飞行的感知意识轨迹生成-ICRA 2024
搞 机 记(寄) 录
SOAR: 异构无人机的同步探索与拍摄,用于快速自主重建 IROS 2024 Oral
自主空中重建 预测助力的规划框架 IEEE ICRA 2023
央视报道反制“黑飞”无人机的“黑科技”,一起来看“2024中国国际社会公共安全产品博览会”最新报道!
【up自制开源】30分钟拥有自己的具身智能触觉系统!柔性触觉不再遥不可及
战双露娜170cm的机器人,长高了的露娜,长大了的露娜,来到现实的露娜,露娜,腿部稍微动一下
最低成本入门无人机!
当下搞钱的大趋势——低空飞行,悄悄看,抓紧干!
二白深夜顺拐机器人
这届进博会含金量太高了,竟然隐藏了改变未来的三个出行黑科技!一起来看看吧!
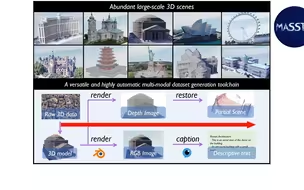
MASSTAR:面向表面预测和补全任务的多模态大规模场景数据集和多功能工具链 ICRA2024投稿
哈工大学生研发的桌面轮足机器人,目前已量产。#轮足机器人 #桌面机器人 #国产机器人 #机器人
导师推荐的数据库!4个神级代码复现网站,里面99%的论文都能找到!
重磅要闻!官媒已经实锤!神话再度破灭!大漂亮林肯航母战斗群被胡塞武装反舰导弹和无人机饱和打击八个小时!!!
炸了,瞬间炸了。低空+稀土+华为+国改+固态电池第一龙头,2项重组动作+10元低价,接力海能达。美国大选已定
咱们离出门打飞的,真的不远了!珠海航展上,低空经济有多火!
无人机表演五星八卦阵、万剑归宗、各种震撼景象把老外给彻底惊呆了!
无人机考试分享
鸡你太美,但是无人机投篮!
周四大消息,还有10万亿刺激!
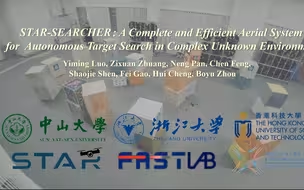
Star-Searcher:复杂未知环境中自主搜索目标的高效完备空中系统 IEEE RAL
RAL Best Paper, H2-Mapping:使用分层混合表征的实时稠密建图 IEEE RAL
折叠翼无人机地面使用教程,全程准备时间不到一分钟,这样的速度算快吗
啥是低空经济?看完你就明白了!
下一代防御系统:配有电光跟踪技术的20 毫米 RCWS 炮塔
小爱通话用我自己声音生成的语音太逆天了,跟伪人一样,很难绷得住
万亿蓝海低空经济是真需求还是伪概念?
原来机器人中也有“人贩子”一个机器人拐跑一大批机器人 #智能机器人 #智能AI #离谱
H3-Mapping:使用准异构特征网格和层级混合表征的实时稠密建图
微醺赛道第二人:如何让恶评无路可走。恶评和鸡柳哥:不知道谁更丢脸
俄罗斯一名士兵巧妙的将自杀式无人机引向他自己,然后跑开了
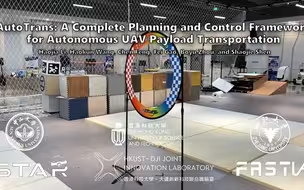
AutoTrans: 自主无人机吊载系统规划与控制 IEEE RAL
画面震撼!无人机空中抛投水袋,精准灭火
机器人如何每日收割数百万英亩农田
你的喜欢航拍,关我“低空经济”什么事?