V
主页
第四章 飞控开发高级篇 4.360度翻滚(从解锁开始讲流程)
发布人
打开封面
下载高清视频
观看高清视频
视频下载器
第四章 飞控开发高级篇 3.定高、定点、悬停(从解锁开始讲流程)
第四章 飞控开发高级篇 1.飞控整机代码走读、编译与烧写
第三章 高级实验篇4.ADXL345三轴加速度实验
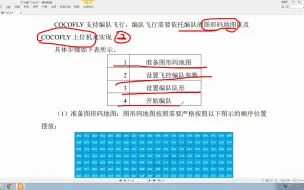
第四章 飞控开发高级篇 7.编队飞行 (整体实现流程)
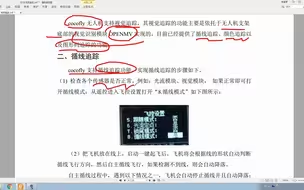
第四章 飞控开发高级篇 5.视觉追踪(巡线追踪、颜色追踪、图形码小车追踪)
第四章 OpenWrt开发实战 2.应用程序的编写和编译
第四章 中级实验篇 5.ADXL345三轴加速度实验
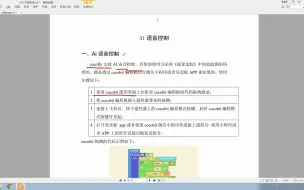
第四章 飞控开发高级篇 6.AI语音控制(语音控制飞机启停、翻滚、追踪等)
第一章 快速上手教程 1.开机测试及硬件资源介绍 (飞机、遥控、cocobit)-1
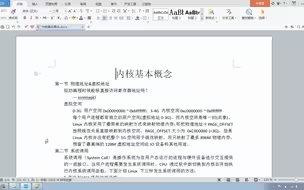
第四章 内核理论基础篇 2.内核基本概念
第二章 飞控开发基础篇 9.PWM(电机控制)
第二章 飞控开发基础篇 7.SPI(气压计数据获取)
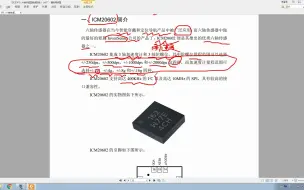
第二章 飞控开发基础篇 6.SPI(六轴传感器数据获取)
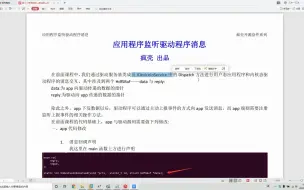
第四章 HarmonyOS驱动开发4.第三个简单的驱动程序示例:应用程序监听驱动程序消息
第二章 飞控开发基础篇 4.串口(光流数据获取)
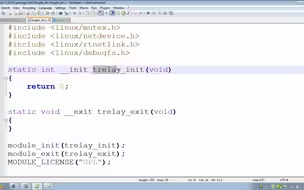
第四章 OpenWrt开发实战 3.驱动程序的编写和编译
第三章 遥控器开发实战教程 3.ADC(摇杆控制)
第四章 蓝牙BLE通信篇1.收发实验
第四章 飞控开发高级篇 2.遥控整机代码走读、编译与烧写
第三章 遥控器开发实战教程 4.SPI(OLED显示屏)
第一章 快速上手教程 2.开机测试及硬件资源介绍 (飞机、遥控、cocobit)-2
从零开始制作四旋翼无人机 EP0 - 项目整体思路介绍
第四章 循环结构1.while语句
第一章 快速上手教程 4.OpenMV视觉固件烧写
第一章 入门篇 1.MTK开发之环境配置
第四章 HarmonyOS驱动开发3.第二个简单的驱动程序示例:应用程序通过HDF框架调用自定义驱动接口
第四章 循环结构3.for循环
第三章 高级篇 4.网络编程
第四章 HarmonyOS驱动开发5.总线驱动开发及实现之GPIO
第四章 项目篇(MTK6260) 6.MTK6260之手表对时
第一章 快速上手教程 7.地面站上位机的使用与介绍
第四章 HarmonyOS驱动开发1.HDF驱动框架
[inav]固定翼垂起(VTOL)参数设置教程
第四章 HarmonyOS驱动开发7.总线驱动开发及实现之I2C
第四章 项目篇(MTK6260) 1.MTK6260儿童定位手表功能测试
第一章 入门篇 2.MTK开发之平台框架
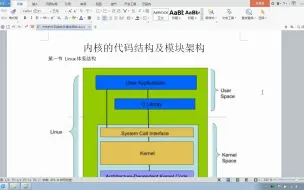
第四章 内核理论基础篇 1.内核的代码结构及模块架构
第三章 高级实验篇1.ADXL345三轴加速度实验
第八章 Android系统定制 1.Android HAL硬件抽象层简介
第四章 HarmonyOS驱动开发8.总线驱动开发及实现之SPI