V
主页
京东 11.11 红包
第20课时.通过用户程序诊断故障
发布人
打开封面
下载高清视频
观看高清视频
视频下载器
15发那科机器人用户坐标系的使用和三点法标定
18 发那科机器人用户坐标系的使用 切换用户坐标系
35 发那科机器人修改机器人程序
41 发那科机器人在程序中使用注释
23 发那科机器人程序结构讲解
S7-1200 Modbus RTU通信(3)-编写主站程序
16 发那科机器人用户坐标系的使用 四点法标定a
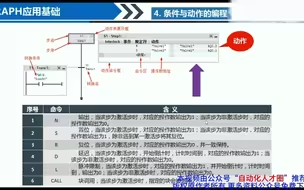
第46课时.GRAPH应用基础
64 发那科机器人输入中文注释
S7-1200的自由口通信(1)-设置参数a
S7-1200 S7-1200的程序结构
40 发那科机器人在程序中调用子程序
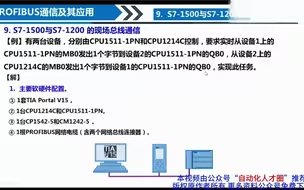
第05课时.PROFIBUS通信及其应用02
46 发那科机器人在程序中使用查找指令
50 发那科机器人在程序中使用跳转语句JMP-LBL
48 发那科机器人在程序中注释显示功能
31 发那科机器人寄存器的使用
17 发那科机器人用户坐标系的使用和直接输入法标定a
04 发那科机器人创建一个程序并示教轨迹a
10_11KUKA机器人主程序对子程序的调用
51 发那科机器人查看机器人当前坐标
第10讲 KUKA机器人全局子程序
31.S7-1200 MODBUS通讯第二讲b
49 发那科机器人在程序中使用分支语句if-select
11 发那科机器人三点法标定工具坐标系定点的操作过程
KUKA机器人程序文件的使用
53 发那科机器人恢复机器人程序
28.1200之间的以太网通讯(一)
44 发那科机器人在程序中复制程序代码
36 发那科机器人在程序中使用io控制机器工具
第18课时.通过Web服务器诊断故障
61 发那科机器人Cclink设置说明
40.S7-1200高速计数器b
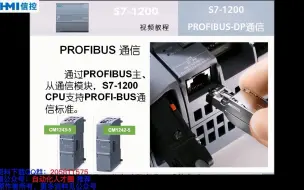
S7-1200 Profibus-DP通信(2)-站组态
31.S7-1200 MODBUS通讯第二讲a
S7-1200 Profibus-DP通信(1)-任务要求
第35课时.S7-1500PLC的PID控制实例
20 发那科机器人的参考点的使用和标定
32 发那科机器人位置寄存器的使用
69 发那科机器人使用Move To面板快速定位