V
主页
康奈尔大学Science子刊带有机载数字控制的微型机器人
发布人
Microscopic robots with onboard digital control 带有机载数字控制的微型机器人 10.1126/scirobotics.abq2296 本文研究并解决了微型机器人领域存在的一个关键障碍:信息系统的集成,并构建了由机载互补金属氧化物半导体电子器件控制的微型机器人。由此产生的自主、无束缚机器人尺寸为100至250微米,由光驱动,行走速度超过每秒10微米。此外,我们还演示了一种能够响应光学命令的微型机器人。这项工作为无处不在的自主微型机器人铺平了道路,这些机器人能够执行复杂的功能,对环境做出反应,并与外界进行通信。
打开封面
下载高清视频
观看高清视频
视频下载器
康奈尔大学重要突破Science子刊带有机载数字控制的微型机器人
Numberblocks 从 1 到 10 再到 30
美国纽约州伊萨卡康奈尔大学-原子与固体物理实验室重磅Science 子刊
南方科技大学刘吉团队Nature Communications一种基于墨水直写的3D打印技术。该技术能够用于一体化设计和制造新型柔性电致发光器件和软体机器
《自然-通讯》韩国科学家重磅发现集成连杆驱动的灵巧拟人机械手
MIT发表Nature创世界纪录!高阵列密度(和最小尺寸的全彩色垂直堆叠μLEDs
美国明尼苏达大学的Michael C. McAlpine团队Science 子刊3d打印柔性有机发光二极管显示器
南京大学王伟团队子刊Hydrogel tapes for fault-tolerant strong wet adhesion容错强湿附着的水凝胶带
马普学会弗里茨·哈伯研究所Nature Catal.通过原位扫描电子显微镜对催化表面反应的动力学进行成像
明尼苏达大学重要突破Science 子刊3d打印柔性有机发光二极管显示器
厦门大学,再发《Nature》!颠覆未来生活的成果! 通过水界面过滤和吸收连续净化空气
燕山大学又发Nature正刊:高韧性金刚石复合材料
哈佛大学 Kevin Kit Parker 团队science10.1126/science.abl6395聚焦旋转射流纺丝重建心脏螺旋结构与功能的关系
NATURE COMMUNICATIONS 上海交通大学刘攀团队Nature子刊纳米结构金属中位错爬升和晶界演化的原位原子尺度观察
science重磅来袭哈佛大学的锁志刚院士团队一种缠结构型超级凝胶
南京大学王伟团队最新子刊Hydrogel tapes for fault-tolerant strong wet adhesion容错强湿附着的水凝胶带
浙江大学邱建荣团队登顶Science正刊玻璃中稳定钙钛矿纳米晶体的三维直接光刻技术
美国加州理工学院Nature正刊!3D打印“软猬甲”!可在柔软和坚硬之间切换,遇强更强!
奥地利 约翰内斯·开普勒大学实验物理研究所软物质物理部 Martin Kaltenbrunner 课题组重磅突破超高速小型软电磁机器人
奥地利 约翰内斯·开普勒大学Nature子刊超高速小型软电磁机器人
中科院白海洋研究团队重磅突破science子刊金属含羞草: 一种由金属玻璃制成的三维仿生屈曲结构
西安交通大学单智伟教授 Nature 子刊镁变形粒化对塑性的再生
催眠成机器人
UCLA苗建伟又发Nature!终于实现科学家90年的梦想!以实验确定了非晶态固体的3D原子位置
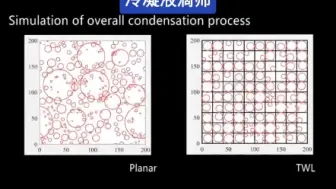
清华大学郑泉水院士重磅来袭《自然·通讯》冷凝液滴筛
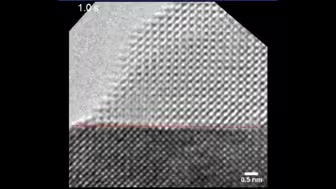
登顶Nature正刊韩国科学技术研究院原位TEM研究亚稳态PdHx生长和稳定机理
英国剑桥大学nature子刊高可压缩的玻璃状超分子聚合物网络
科英布拉大学《Nature》子刊: 可拉伸500%的柔性集成电路!利用可逆聚合物凝胶转变实现的超拉伸芯片集成电路
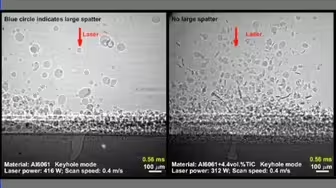
美国威斯康星大学麦迪孙分校的Lianyi Chen团队 缺陷贫金属增材制造的工艺不稳定性控制
WO3纳米线的锂化长度随动态锂化过程时间的变化。
首个男性避孕药两小时内100%避孕
博士生一作发Nature!金属位错研究取得重大成果!美国纽约州立大学周光文团队重要突破!
登顶Nature Nanotechnology韩国先进科学技术研究院人体肌肉启发的单纤维致动器
南方科技大学王宏强课题组重磅发现Nature子刊复杂高纵横比微通道的自收缩软脱模
奥地利 约翰内斯·开普勒大学重磅突破超高速小型软电磁机器人
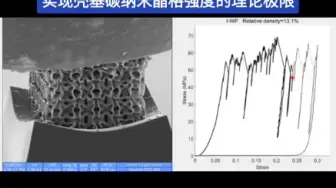
清华大学李晓雁团队重磅突破实现壳基碳纳米晶格强度的理论极限
女神贺曦敏《Nature》超过天然肌腱和蜘蛛丝!冷冻浇铸和盐析的协同作用获得强韧的水凝胶
登顶Science正刊北京工业大学韩晓东团队重要突破在原子尺度上跟踪晶界的滑动
伦敦大学《Nature》子刊激光增材制造过程中的孔形成机制!
以木代钢!超硬木材,硬度提升23倍!