V
主页
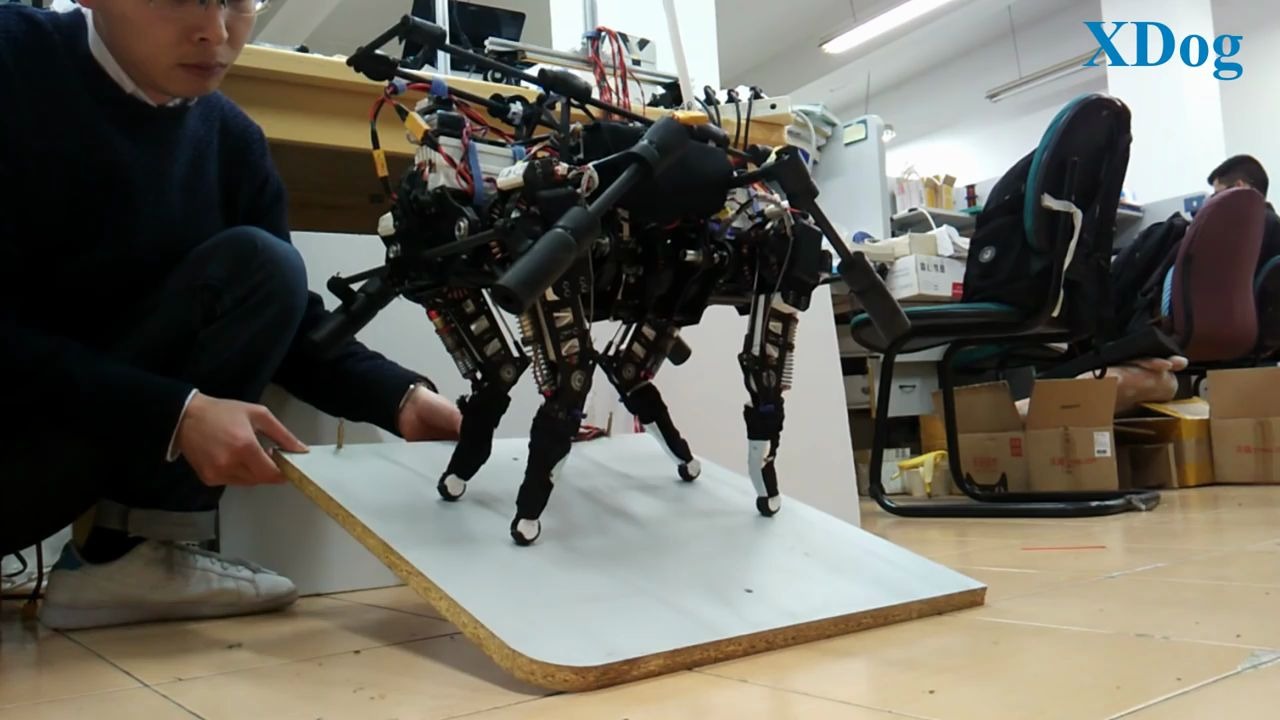
【毕设】XDog 从电路板、整机机械结构到运动控制
发布人
我一个人完成的毕设。 2013~2016年完成,13年下半年完成了机器人的基本控制仿真,14年上半年自研了无刷电机的PCB驱动板和FOC控制程序,14年下半年主要在折腾整机的高速实时通讯。 当然在13年到15年期间,陆续设计了整机的机械结构、力传感器和运动控制程序等。 15年,为了完成这台机器人,主动申请延毕了半年。15年下半年也是通过这台机器人很迅速的拿到了DJI的offer。 也是在15年,用这台机器人,一个人报名参加了上海的一个科创比赛,拿了二等奖(一等奖是上海交大的一个团队),获得了8万元奖金。 这台机器人,研发成本,其实只有1~2万元人民币(前期,我自己垫了小几千本科时候攒的钱,后期导师赞助的经费)。 所以这台机器人帮我硕士期间,赚了好几万元人民币(从这后就没找家里要过一分生活费了,当时对我来说的巨款,后来16年创业初期,马上花光了。。。)
打开封面
下载高清视频
观看高清视频
视频下载器
老外见到中国机器狗!太不可思议了!科技感十足!
军犬!超凶~ 中国机器战狗
One Legged Robot Simulation in 3D
智能旋钮 毕设
耗时近半年,我成功复刻了稚晖君的ElectronBot
当人形机器人通过GPT3控制表情
大家还记得这个力反馈旋钮么,花两个月我做了个更好的
【同款PK】国产宇树、波士顿动力和苏黎世联邦理工三家机器狗斗舞!
天津大学仿蝠鲼水下机器人
四足机器人的变革与机遇
本科毕设,平衡机器人 RangoB3调试“寄录”
One Leg Robot Simulation ( Hopping machine 2D )
XDog (Year 2014) leg driven by the outrunner brushless motor (8108), with be
【拆机揭秘】:同步带行星减速器
代码写的很好,下次不许再写了
什么?!电影里的十二足机器人做出来了?!你在开玩笑
四足机器人技术及发展趋势的一点分享
XDog - One Legged Robot Simulation in 2D
2017年,宇树第一台Laikago样机性能展示(仅此一台)
给浙大控制机械狗宣传一下~
波士顿动力公司机器人进化史
XDog - Small Electric Direct Driven Bionic Four Legged Robot (controlled
进国赛了,可以发了
XDog - Small Electric Direct Driven Bionic Four Legged Robot
Two legged Robot Simulation ( Hopping machine 2D )
参会 ICRA 2022 第六届足式机器人 Workshop
我成功了,【自制】时速120km/h的遥控车,超音速推进号SSC
XDog - Small Electric Direct Driven Bionic Four Legged Robot (walking on t
宇树科技运动性能超过波士顿动力Spot的大型机器狗B1,简短宣传视频
用小米电机整点活
极客公园 x BiliBili x 王兴兴
代码以另一种方式运行起来了
【开源啦!】无刷轮腿平衡机器人
Quadruped
2017年,开局一条狗
自己平衡的自行车
3R机械臂拙劣的双人舞
牛顿站在了45.6°上
宇树发布: Unitree Go2 具身智能 新物种 9997元起
宇树科技 G1工程机在ICRA2024