V
主页
[7.2.3]--PID参数对系统性能影响
发布人
https://www.icourse163.org/spoc/course/ZJUT-1462902164?from=searchPage&outVendor=zw_mooc_pcssjg_
打开封面
下载高清视频
观看高清视频
视频下载器
[7.6.1]--PID控制器参数的整定方法
[7.2.2]--PID控制例子
[7.4.1]--非线性PID控制器
[7.2.1]--数字PID控制器
[7.6.2]--PID自整定技术
梓,不吉利的文字。
[8.2.1]--8.2.1典型输入下最少拍系统的设计
[5.3.1]--中值滤波
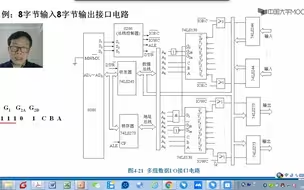
[4.5.5]--IO接口设计
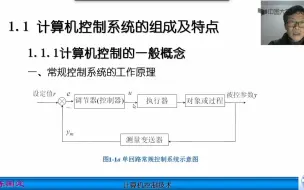
[1.1.1]--(1)计算机控制系统的一般概念
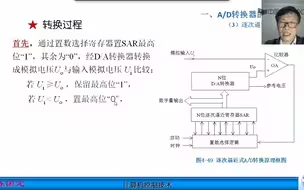
[4.9.2]--ADC(2):逐次逼近AD
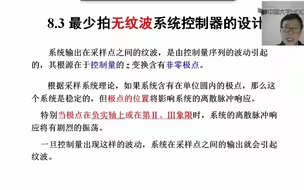
[8.3.1]--最少拍无纹波系统控制器设计
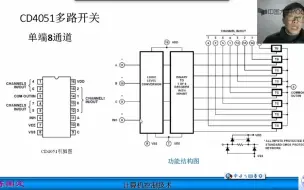
[4.2.1]--多路开关
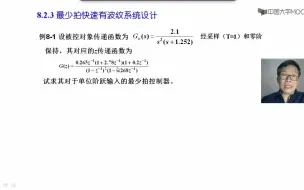
[8.2.3]--8.2.3最少拍有纹波系统设计
博士毕业论文《不确定非线性系统自适应预设时间控制》华长春教授
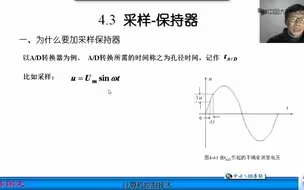
[4.3.1]--采样保持器
基于关节力传感器的导纳控制
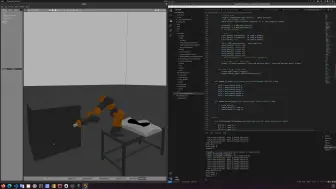
7DoFs + opencv + ros协作机械臂力控
[8.6.1]--大林算法
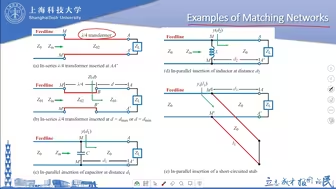
听得懂的电磁学-8.8.1阻抗匹配一
[7.3.2]--微分饱和作用与抑制—不完全微分、微分先行等
[8.1.1]--引言
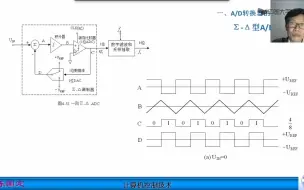
[4.9.5]--ADC(5):sigma-deltaAD
RS-26榛树,吊 炸 天!恐怖的威亚!10马赫就着效果,20马赫难以想象!
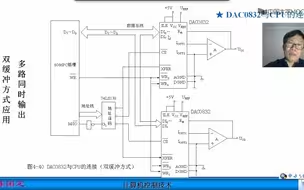
[4.8.8]--DAC0832与CPU连接
本科毕设仿真2.0-力控
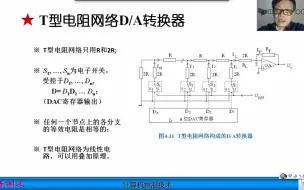
[4.8.2]--DAC工作原理——T型电阻网络DA
[7.7.1]--Smith预估
[1.3.1]--计算机控制系统的发展
[4.8.1]--DAC工作原理——二进制加权DA
[5.5.1]--Kalman滤波
多关节零力拖动
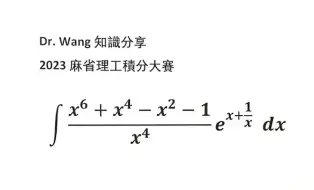
求不定積分 | 2023 麻省理工 積分賽 | 微積分
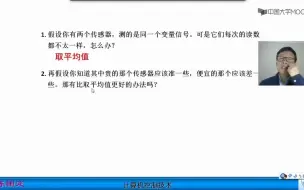
[5.2.1]--平均值滤波
[9.3.1]--动态矩阵控制DMC
B站最全【奇门遁甲】从0基础到进阶和实战课程(全13讲)
《绳缚》——进阶指南·基本手法
挑战丨魔方从 1 级到 9999 级!
[7.3.1]--饱和作用的抑制—遇限削弱积分、积分分离
[8.2.4]--8.2.4最少拍系统的局限性