V
主页
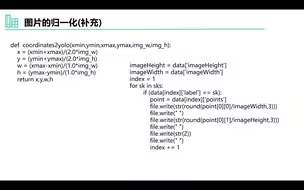
(五)1.Delta X机器人电路连接(原理)
发布人
Delta X机器人电路连接及Arduino mego2560与ramps1.4引脚对应关系。
打开封面
下载高清视频
观看高清视频
视频下载器
Delta X机器人原理分析与制作(二)1.机械结构分析
(三)2.Delta X机器人运动学方程的建立
(六)1.第一次通电试运行DeltaX机器人
(三)4.Delta X机器人逆运动学解算(含代码)
(三)5.Delta X机器人的工作空间
(四)1.Delta X机器人变速箱及主动臂的安装
(四)3.Delta X机器人从动臂安装
(四)2.Delta X机器人主体框架的安装
(五)3.Delta X机器人电路的连接
(六)2.DeltaX机器人一些制作问题的解决
机器人面部制作教程
手把手教你做六足机器人!
(三)8.Delta X机器人正运动学解算详细计算过程
(五)2.DeltaX机器人主动臂等参数设置
从0开始运行YOLOV5:1、YOLOV5 CPU运行环境搭建
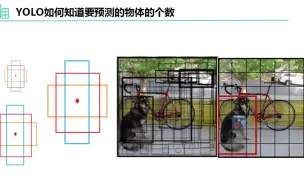
YOLO原理,YOLO如何知道要预测物体的个数
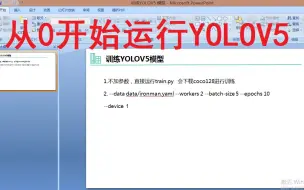
从0开始运行YOLOV5:7、YOLOV5模型训练
【手绳编织教程】Delta原创饰品设计 心相印
从0开始运行YOLOV5:2、YOLOV5 GPU运行环境搭建
从0开始运行YOLOV5:6、手动标注工具labelimg的使用
六足机器人重大更新,手把手教你制作
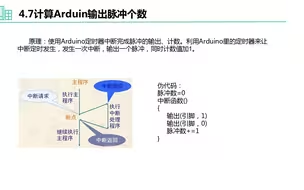
(三)7.计算Arduino输出脉冲个数
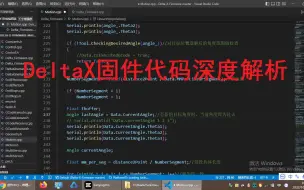
DeltaX固件代码深度解析(1)从GCode到G函数的调用
从0开始运行YOLOV5:4、让YOLOV5跑起来
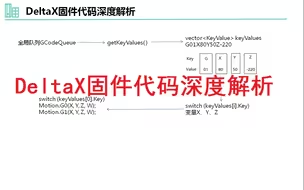
DeltaX固件代码深度解析(2)getKeyValues函数解析
获取并使用YOLOv5识别结果
YOLOV7姿态关键点标注工具labelme的使用(二)
【自制】我开发了一个通用机器人大脑!【硬核】
2024全球十大人形机器人:中国机器人强势崛起!
(4)线性插补调用的函数
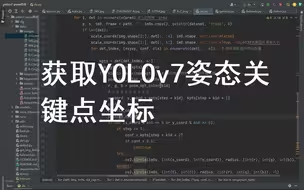
获取YOLOv7姿态关键点坐标
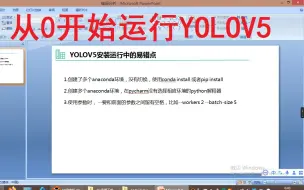
从0开始运行YOLOV5:3、YOLOV5安装运行中的易错点
折纸骨龙教程——头部(1)
从0开始开始运行YOLOV5:YOLOv5使用电脑屏幕做输入
从0开始学习YOLOV8:3、模式与任务
【手搓高科技】数学 + 机械臂能碰出什么火花
如何快速区分Yolo中的精确率与召回率
[IROS 2024] PanopticRecon: 利用开放词汇实例分割实现零样本全景重建
YOLOV7的使用:1、使用YOLOV5运行环境运行YOLOV7
卷积神经网络输出结果的意义(上)