V
主页
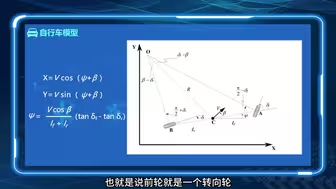
7.6 运动规划算法
发布人
打开封面
下载高清视频
观看高清视频
视频下载器
8.1 控制算法概述
4.1 精确定位技术概述
4.5 SLAM原理及应用
8.2 ACC控制算法
PLUTO算法详解:端到端首次超越基于规则的方法
3.5 车载计算平台
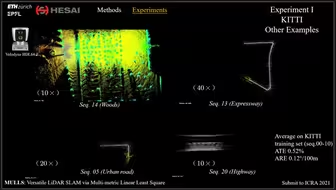
22年十佳开源SLAM算法
6.2 超声波雷达与毫米波原理及应用
3.3 线控制动系统原理与实现
4.4 无线定位原理
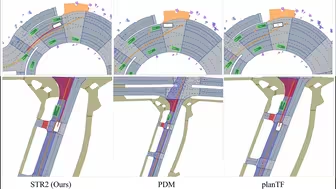
赵行团队新作 | 通过专家混合 模型提升自动驾驶运动规划器的 泛化能力,实现性能新SOTA
7.2 全局路径规划
7.1 自主决策系统的体系结构与分析
6.1 车载雷达分类与特点
8.3 横向控制算法概述
11.1 无人驾驶技术的应用现状
6.4 机械旋转式激光雷达分类
6.3 车载激光雷达原理
11.4 无人驾驶技术在矿区和港口的应用
3.4 线控油门、挡位与辅助系统实现
6.5 激光雷达应用实例分析
11.3 无人驾驶技术在农牧业的应用
7.3 基于规则的行为决策
3.1 线控系统改造概述
8.4 纵向控制算法概述
3.2 线控转向系统原理与实现
11.2 无人共享出租车和公共交通
2.2 CAN总线技术
5.2 相机的标定
4.6 多传感器融合定位案例解析
流畅的FSD V12.5.6.1版本完全自动驾驶 计算机视觉+端到端神经网络
7.4 强化学习方法介绍
4.3 磁导航与惯性导航系统原理
4.2 GNSS系统及应用
浙大Fast-Lab高飞老师 详解第二届ARTS 自主机器人技术研讨会
5.1 视觉感知与应用概述
6.7 激光雷达与图像检测算法
2.4 车载总线开发实例
2050,张伟的一天
NeurIPS'24 | DHD: 多无人机协同感知框架,提升 目标轨迹预测的准确性和全面性