V
主页
4.2 GNSS系统及应用
发布人
打开封面
下载高清视频
观看高清视频
视频下载器
4.1 精确定位技术概述
2.2 CAN总线技术
3.5 车载计算平台
6.4 机械旋转式激光雷达分类
6.3 车载激光雷达原理
8.2 ACC控制算法
7.6 运动规划算法
2050,张伟的一天
3.4 线控油门、挡位与辅助系统实现
7.3 基于规则的行为决策
11.1 无人驾驶技术的应用现状
8.4 纵向控制算法概述
3.2 线控转向系统原理与实现
6.1 车载雷达分类与特点
11.4 无人驾驶技术在矿区和港口的应用
武汉郊区的萝卜快跑无人驾驶出租车
10.3 北京无人驾驶测试与评估
[广州地铁]开线十四载 蓝色中轴线 广州地铁APM线双向全程报站广播
6.6 激光雷达常用聚类算法
4.5 SLAM原理及应用
2.1 车载总线技术概论
8.3 横向控制算法概述
6.2 超声波雷达与毫米波原理及应用
6.5 激光雷达应用实例分析
2.4 车载总线开发实例
11.6 无人驾驶技术教育平台
5.2 相机的标定
旋风智能车-智能网联沙盘演示系统2024
《无人驾驶技术概论》宣传片
3.3 线控制动系统原理与实现
3.6 案例分析
7.4 强化学习方法介绍
什么!我的车可以自己跑滴滴了?
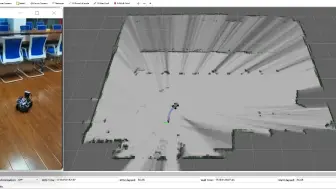
基于低成本1线激光雷达的SLAM
10.1 世界无人驾驶政策发展概述
流畅的FSD V12.5.6.1版本完全自动驾驶 计算机视觉+端到端神经网络
3.1 线控系统改造概述
8.1 控制算法概述
【up自制开源】30分钟拥有自己的具身智能触觉系统!柔性触觉不再遥不可及
4.3 磁导航与惯性导航系统原理