V
主页
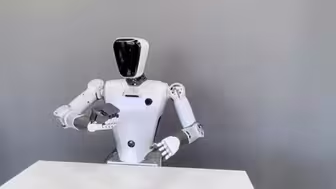
CMU 研究 —— 学习对人形机器人的实时全身遥操作
发布人
Tairan He*, Zhengyi Luo*, Wenli Xiao, Chong Zhang, Kris Kitani, Changliu Liu, Guanya Shi https://human2humanoid.com/ H2O(Human-to-Humanoid,人对人仿真机器人)可使一个完整大小的仿人机器人进行实时全身远程操作,以执行拾放、行走、踢腿、拳击等任务。
打开封面
下载高清视频
观看高清视频
视频下载器
Talk | 卡耐基梅隆大学何泰然:安全、敏捷、能泛化的基于强化学习的机器人控制
【自制】我做了一种很新的 机 器 人!【硬核】
我做出了铁甲钢拳里的机器人!实现了12岁的梦想!!!
开源人形机器人强化学习训练框架!星动纪元联合清华大学、上海期智研究院发布Humanoid-Gym!
【毕设开源3】matlab四足机器人步态仿真与代码讲解
稚晖君的机器人又融资了,最新估值70亿
稚晖君Dummy微型力控夹爪来了!(夹个蛋蛋测试,结果蛋碎了一地啊😭)
2015年5月美国麻省理工学院研制的猎豹II成为世界上第一个可以在跑动中自动跳跃障碍物的四足仿生机器人
我被MIT哈佛CMU录取了!计算机博士申请季纪实
宇树H1人形机器人街头舞蹈
人形机器人,精致、优雅、力量、阶段性成果ing……
基于强化学习,逐际动力双足机器人P1野外徒步
千万不要做数据标注!!!
vlog|卡内基梅隆|在cmu上学的一天是什么体验(其实也没什么体验
开源人形机器人强化学习训练框架!星动纪元联合清华大学、上海期智研究院发布Humanoid-Gym
波士顿动力 Predictably Spot-On Industrial Inspection Boston Dynamics
CMU 最优控制 2024 助教补充 第 7 讲
斯坦福大学 —— 机器人与具身人工智能实验室
波士顿动力好酷
人工智能vs人类! 谁才是更好的英语口语老师?
Guanya Shi AI in Robotics Seminar.mp4
波士顿动力公司机器人进化史
稚晖君半年完成AI智能机器人样机!#机器人 #人工智能 #AI
如何从零准备一次留学申请-MIT哈佛CMU录取经验分享
[GrizzHack]记录一下我在美国第一次参加hack比赛。太有意思了,24小时的高强度编程
三菱电机研究 —— 自主机器人装配齿轮箱
2024 斯坦福 凸优化教程 Stephen Boyd 第一讲
全球首次 全尺寸电驱 人形机器人原地空翻
特斯拉发布第二代擎天柱机器人视频
MIT 机器人研究 —— 机器人灵巧操作
打破人形机器人速度世界记录 宇树H1
CoRL 辩论 —— 扩大规模是否足以部署通用机器人?
特斯拉人形机器人最新进展…
宇树发布丨Unitree B2 突破极限 超进化!
开箱开箱!感谢宇树科技的赞助!
宇树 Unitree B2 又进化了,有极限吗?
多伦多大学航空航天研究所 CMake 教程 Lecture 1-Part2
深度无监督学习 UC 伯克利 2024 第 7 讲 自监督学习
【波士顿动力】Atlas三年间的变化!进步神速!
【4k】【铁甲钢拳】亚当大战宙斯