V
主页
京东 11.11 红包
CMU 最优控制 2024 助教补充 第 7 讲
发布人
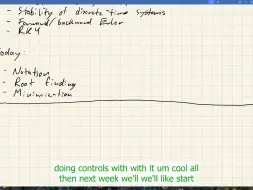
https://optimalcontrol.ri.cmu.edu/rec... 00:00 intro 01:20 quiz 6 solutions 07:16 rotation matrices 34:00 axis-angle 40:15 quaternions
打开封面
下载高清视频
观看高清视频
视频下载器
CMU 最优控制 2024 第一讲
CMU 最优控制 2024 第 11 讲 Differential Dynamic Programming(DDP)
实时最优控制讲座 —— 从航空航天的角度
实时最优控制讲座 —— 最优控制机器人软件
CMU 最优控制 2024 第 3 讲 Optimization Pt 1
CMU 最优控制 2024 助教补充 第 2 讲 牛顿法和受约束优化
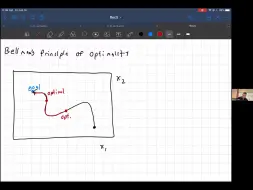
CMU 最优控制 2024 助教补充 第 5 讲 动态规划与 MPC
CMU 最优控制 2024 第 1 讲
MIT 机器人讲座 —— MuJoCo MPC (MJPC) 介绍
CMU 最优控制 2024 第 10 讲 非线性轨迹优化
实时最优控制讲座 —— Crocoddyl 教程
CoRL 讲座 Russ Tedrake - 从鲁棒控制到基础模型,对鲁棒性的看法多种多样
CoRL 讲座 Scott Kuindersma - 基于模型的控制有助于学习
实时最优控制讲座 —— OCS2 教程
斯坦福开源 - 机器人技能学习 通用接口UMI - 机械夹爪装配教程
实时最优控制讲座 —— TrajectoryOptimization.jl 教程
CMU 最优控制 2024 第 8 讲 可控性和动态规划
CMU 最优控制 2024 助教补充 第 8 讲
MIT 欠驱动机器人学 2024 第 8 讲 Computing Lyapunov Functions I
IROS 2023 基于模型的多接触操作
CMU 最优控制 2024 第 6 讲 确定性最优控制入门
CMU 最优控制 2024 助教补充 第6讲 轨迹优化
MIT 欠驱动机器人学 2024 第 9 讲 Computing Lyapunov Functions II
USC 机器人讲座 —— 复杂地形上的机器人运动与感知
CoRL 讲座 —— 用于机器人的预训练模型
开源人形机器人强化学习训练框架!星动纪元联合清华大学、上海期智研究院发布Humanoid-Gym!
ETH + NVIDIA 研究 —— Orbit: 交互式机器人学习环境的统一仿真框架
[PongBot-W] Exploring Campus with Wheeled Quadruped Robot
CMU 最优控制 2024 第 5 讲 Optimization Pt. 3
CoRL 机器人讲座 —— 通向通用机器人之路
CoRL 讲座 —— 利用 MuJoCo 物理模型进行基于模型的优化
2024 斯坦福 凸优化教程 Stephen Boyd 第 6 讲
ETHZ 研究 —— 四足机器人深度柔顺运动控制
慕尼黑工大机器人研究 —— 人工神经假肢控制系统
CoRL 讲座 - 基于仿真学习的具身智能
CMU 最优控制 2024 第 7 讲 线性二次调节器的三种方法
2024 斯坦福 凸优化教程 Stephen Boyd 第三讲
意大利 IIT 讲座 —— 结合学习和模型预测控制的机器人安全控制
EPFL 四足机器人研究 —— ManyQuadrupeds: 多种类四足机器人学习运动策略(ICRA 2024)
IEEE 机器人讲座 —— MuJoCo MPC (MJPC)介绍