V
主页
【电控算法_8】无差拍模型预测电流控制DPCC离散模型
发布人
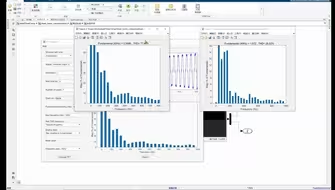
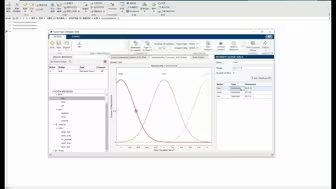
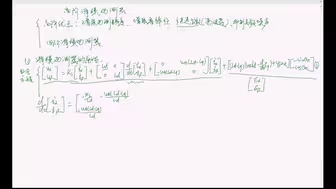
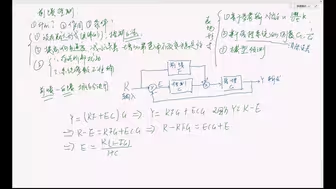
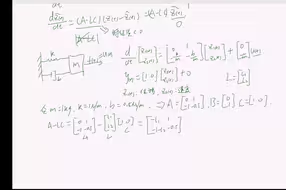
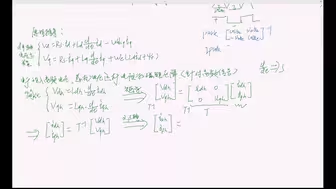
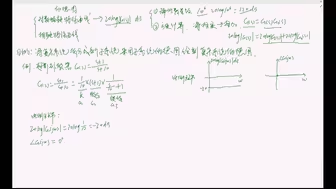
无差拍模型预测电流控制DPCC 离散模型(采用龙伯格+电流预测控制算法)
打开封面
下载高清视频
观看高清视频
视频下载器
【电控算法_6】死区补偿 ~最强讲解
【智能算法_1】模糊控制
【电控算法_2】非线性有源磁链观测器 - 基于IPMSM模型
【电控算法_3】高阶滑模观测器算法分析与仿真 - 基于IPMSM电机模型
【自控_1】拉普拉斯变换 - 公式推导
【自控_13】前馈控制 - 三种控制形式的matlab仿真
I/F启动+双dq空间切换+龙伯格观测器
【自控_11】超前补偿器 - matlab仿真
【绝对精华】电机控制标幺化处理及相关推导
高阶滑模观测器 - 实现零速启动
【自控_26】观测器设计 - 龙伯格观测器
【绝对精华】_FOC快速入门还能学会SVPWM编程
【电控算法_5】MTPA_弱磁_MTPV ~全网最全
【电控算法_4】遗忘因子递推最小二乘法电机参数辨识 ~全网最全
【电控算法_1_1】高频注入极性辨识 ~全网唯一
【自控_6】二阶弹簧阻尼系统应用 - 锁相环分析
【自控_3】二阶弹簧阻尼系统上 - 欠阻尼系统推导分析
【电控算法_1】高频方波注入 ~全网最全
【自控_2】一阶系统 - 惯性环节分析
【自控_4】二阶弹簧阻尼系统中 - 性能指标推导分析
【自控_7】终值定理 - 比例积分控制
【自控_16】状态空间方程 - 特征值与特征向量的妙用
【电控算法_7】I/F启动+双dq空间切换 ~全网唯一
【自控_14】状态空间方程 - 单输入单输出
【复现】基于NMPC非线性模型预测控制USV多无人船编队控制
【自控_24】控制器设计 - 倒立摆平衡控制
【自控_23】李雅普诺夫稳定判据 - 系统状态变量稳定利器
【自控_8】根轨迹绘制上 - 基本规则
【自控_12】滞后补偿器 - matlab仿真
【自控_5】二阶弹簧阻尼系统下 - matlab仿真分析
【自控_22】奈奎斯特稳定性判据 - 彻底搞懂内奎斯特图
多决策智能体的运动规划——上海交大董伟老师与荷兰代尔夫特理工Javier老师深度讨论
【自控_15】状态空间方程 - 多输入多输出
【自控_21】伯德图 - 频率响应特性神器
【自控_9】根轨迹绘制下 - matlab动态根轨迹追踪
【自控_18】频率响应特性推导 - 伯德图的前戏
【自控_25】控制器设计 - 倒立摆轨迹追踪
【自控_10】根轨迹几何性质 - 零极点配置
RL vs MPC,LeCun:MPC,胜!我不看好强化学习
【自控_19】一阶频率响应分析 - 巴特沃斯滤波器的滤波原理