V
主页
京东 11.11 红包
简易有限元自学教程第四讲(上)能量守恒的困境与最小势能原理
发布人
第四讲太过庞大,分为上下两部分,自制教程,有问题欢迎弹幕留言,哦耶
打开封面
下载高清视频
观看高清视频
视频下载器
简易有限元自学教程第四讲(下)最小势能原理的证明(硬核!!)
简易有限元自学教程第四讲番外 关于可能的位移的进一步解释
简易有限元自学教程第三讲 弹性力学方程梳理
简易有限元自学教程第五讲 将“填空题”变为“选择题”的近似解法
简易有限元自学教程第六讲 手算有限元 (正篇完结篇)
简易有限元自学教程第一讲 入门门槛与使用说明
简易有限元自学教程第二讲 有限元为什么会存在?
简易有限元自学教程第七讲 番外2:最小值和极小值的区别
贝叶斯滤波与卡尔曼滤波第四讲 连续随机变量的贝叶斯公式
代数方程求根与置换群第四讲 方程求根与对称性的关系
【基础】自动驾驶控制算法第四讲 坐标变换与横向误差微分方程
贝叶斯滤波与卡尔曼滤波第十一讲 粒子滤波代码
贝叶斯滤波与卡尔曼滤波第九讲 粒子滤波原理详述
贝叶斯滤波重制版第三讲 马尔可夫过程详解
自动驾驶决策规划算法序章 总纲与大致目录
直观解释欧拉-拉格朗日方程——拉格朗日力学
贝叶斯滤波与卡尔曼滤波第十三讲 扩展卡尔曼滤波及其代码
贝叶斯滤波与卡尔曼滤波第六讲 随机过程的贝叶斯滤波(贝叶斯滤波完结)
贝叶斯滤波与卡尔曼滤波第十二讲 粒子滤波拾遗:采样方法、预测方程(粒子滤波完结)
贝叶斯滤波与卡尔曼滤波第八讲 从零开始码出卡尔曼滤波代码
【基础】自动驾驶控制算法第十二讲 横纵向综合控制(完结)
贝叶斯滤波重置版第四讲 贝叶斯滤波推导与非线性卡尔曼滤波
贝叶斯滤波与卡尔曼滤波第一讲 很有必要的绪论
贝叶斯滤波与卡尔曼滤波第七讲 卡尔曼滤波
自动驾驶决策规划算法第三章第一节 Apollo em motion planner 论文详解
【基础】自动驾驶控制算法第八讲(二) 简单的软件操作
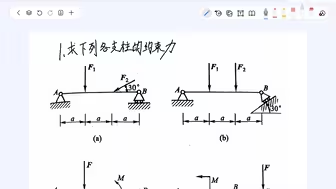
工程力学-静力学-平面一般力系
贝叶斯滤波重制版第一讲 随机过程与贝叶斯派
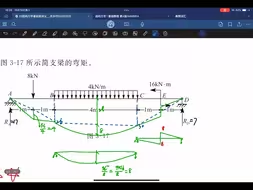
结构力学快速弯矩图技巧
分视频4-“数据”驱动: “面朝屏幕”把握新机遇
贝叶斯滤波与卡尔曼滤波第十四讲 无迹卡尔曼滤波
【基础】自动驾驶控制算法第八讲(三) 代码与模型
【基础】自动驾驶控制算法第九讲 纵向控制开篇
自动驾驶决策规划算法第二章第一节 决策规划仿真平台搭建
自动驾驶决策规划算法第一章第一节 细说五次多项式
【基础】自动驾驶控制算法第十讲 油门刹车标定表的制作
B站最新 顶级费曼学习法,学习一小时抵过十小时!目前B站最完整的高效学习方法教程!
贝叶斯滤波与卡尔曼滤波第十五讲 无迹卡尔曼滤波代码
贝叶斯滤波与卡尔曼滤波第十六讲 总结与拾遗(完结)
【基础】自动驾驶控制算法第一讲 绪论与前期准备