V
主页
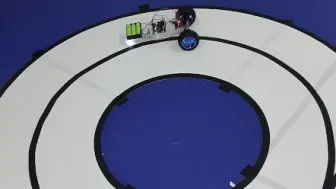
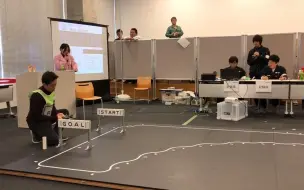
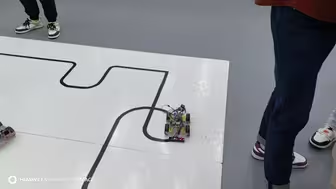
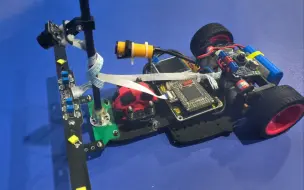
超快!飞一般的智能车 循迹/避障/PID大公开 体验紫丁香的速度【基础四轮组】
发布人
本视频由达尔闻制作,哈工大紫丁香战队的四轮组出镜。
打开封面
下载高清视频
观看高清视频
视频下载器
智能车基础硬件入门
第26课.14天搞定智能小车:循迹功能(完结)
【PID】STM32F103C8T6循迹小车
智能车全向组之疯狗模式
【开源】PID循迹小车2
37个国一!究竟是什么车队国奖拿到手软?
PID算法 - 从入门到实战!
【17智能视觉】学妹写的速度规划,让我叹为观止…
从蹒跚起步到3.6m/s,一年的智能车竞赛记录
封车前最后一发 不知道这速度能不能拿个国一
关于智能车摄像头组速度决策思路分享和一个很简单的调试手段
从大一弃赛到国赛第一(线上)——以此片纪念我的三年智能车生涯
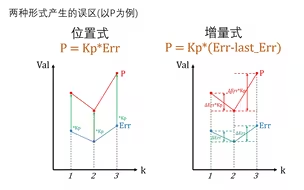
智能车入门:数字PID控制
“智能车调参神器”——Blinker
假如不调PID,小车会“魔怔”吗?一个例程整明白PID的意义
智能车|四轮车这么做可以国一!软硬件全攻略
电磁组智能车三连可私信基础代码
stm32红外循迹小车--如此简单【源码回复关键词获取】
【开源】5分钟学会单片机小车避障和循迹功能,还可以自由切换?!
论大一上的新生做巡线车有多废物(pid,三灰度,从0到1用时6天)
智能车培训-三轮差速、斜率偏差合成、PID教学,补充了上期电磁的一些知识点
日本高速循迹小车 冠军
【智能车】循迹/避障/PID算法控制 技巧
五路红外循迹小车演示,可给代码
[开源]_[Opencv教程]智能车巡线代码讲解(番外篇)
4路红外循迹小车,原理图和代码介绍,略微提速
全国冠军!快到模糊!第十六届智能车某冠军车珍贵影像史料(第一视角)
第十八届智能车摄像头组程序讲解视频
关于智能车摄像头四轮拐弯不对称和差速方面的一些建议
高速循迹小车
校赛一等奖,狂野循迹小车!
智能车制作第十七节:避障、停车及寻迹任务完成
【紫丁香】18届智能车回忆录
智能车寒假培训——电磁循迹与PID调节
智能车摄像头算法开源啦!灰度,大津,Soble,逆透视,八邻域开源啦
【国一记录】第十七届全国大学生智能车竞赛电磁组全国一等奖视频(自制车模)3米/秒
【开源】STM32超声波避障小车
19届四轮摄像头新人极速入门与快速上三,并详解苏神的动态目标速度与动态偏差帮助冲刺摄像头速度极限
【国奖开源】受不了别人拿我们爆肝几个月的成果去赚钱。
智能车循迹进阶——灰度八邻域:基于灰度图的八邻域,写着玩的,未加限制条件,遇到边缘渐变死翘翘。