V
主页
智能车摄像头算法开源啦!灰度,大津,Soble,逆透视,八邻域开源啦
发布人
开源开源开源!!!
打开封面
下载高清视频
观看高清视频
视频下载器
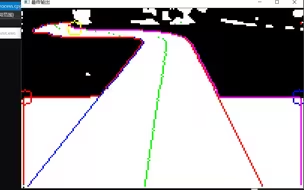
八邻域巡线,程序绝对可以跑,请自行阅读简单移植。
智能车制作加餐:摄像头数字图像处理算法
“人机合一”|南京航空航天大学自定义控制器远程体感操作工程机器人机械臂兑换矿石
【零基础】10分钟编程控制摄像头,开启图像处理之旅
八邻域视觉,十字补线程序讲解,智能车竞赛,开源可移植
智能车培训-三轮差速、斜率偏差合成、PID教学,补充了上期电磁的一些知识点
智能车制作加餐:OLED实现二级菜单交互
智能车图传上位机使用说明
[开源]_[Opencv教程]智能车巡线代码讲解(番外篇)
(智能车实验室)手把手教智能车小白从0开始写整齐的代码
感为八路灰度传感器的代码封装和移植教程
智能车 Canny算法效果展示
OpenMv - 从入门到实战!(寻迹/串口通信/脱机调阈值/模板匹配...)
智能车新手入门 电磁 摄像头 硬件入门 新手向
智能车图像处理进阶——灰度八邻域:解决一个小问题,感觉可以继续写下去,大佬轻点喷。
【直播切片】新手入门向 - 摄像头图像处理 思路浅析
18届智能车 上位机角度闭环演示
厦门大学嘉庚学院智能车队电磁循迹培训
关于智能车摄像头组速度决策思路分享和一个很简单的调试手段
【恩智浦杯智能车】看完你就会判断电磁赛道、出入环岛、岔路啦 -- 软件部分
23工训赛(工创赛)四川赛区智能物流小车全记录(完全开源)(具体请看简介)
卧槽!惊现四米室内神车! 究竟是何方大佬?
5分钟八邻域代码逐句详解,开源,移植一步解决,智能车竞赛
中国海洋大学19届智能车第一次培训_录播
超快!飞一般的智能车 循迹/避障/PID大公开 体验紫丁香的速度【基础四轮组】
【开源啦!】无刷轮腿平衡机器人
四分钟讲懂视觉部分八邻域,生长方向原理和应用,全部开源,智能车竞赛
【全网最详细】摄像头原理分析
反光?Canny ?
玩过了,确实遗憾
校赛必备!从零开始,硬件部分最基础教学,教你打造属于自己的智能车!帮你弯道超车,轻松胜出!初次尝试录制智能车视频,专业人士多多指点!
18届智能车单车组单车越野国一开源,控制部分代码讲解,foc,串级直立环调参,舵机融合压弯,动态零点
摄像头四轮元素补线思路
智能车制作第十六节:速度闭环及按键调参
逆透视放车上的效果图(水视频哈哈)
【全网首家开源】O型车模独轮车制作教程,助力智能车
智能车进国赛经验技巧分享
8、基础循迹的图像处理部分(1)
智能车基础硬件入门
骨灰级智能车教学,基于逐飞TC264开源库(ADS,KEIL,MRS)