V
主页
part5_虚拟机及网络配置
发布人
打开封面
下载高清视频
观看高清视频
视频下载器
part8_建图
《松灵ROS2开讲啦》第四期直播课:ROS 2代码实践
part9_导航
Gazebo仿真环境搭建
part6_摄像头
part3_充电
Gazebo加载控制器
ROS2 零基础入门教材推荐
Gazebo添加传感器
《松灵ROS 2开讲啦》第五期 ROS 2中常用的SLAM建图方法
part7_语音
part2_硬件介绍
part4_遥控器
ROS-USB串口使用
Unitree 2024 ROS暑期学校课程视频03-人形机器人运动控制分享
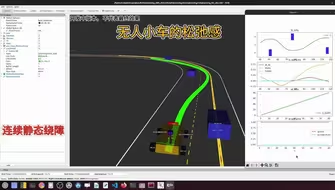
《基于ROS2的决策规划算法工程》动态避障演示 无人小车的松弛感
基于ros路径规划+避障演示
基于stm32和ros串口通信,利用moveit进行路径规划,将轨迹送给stm32执行,带动机械臂运动
ROS-自定义消息类型
基于多智能体强化学习的多小车建图与导航
1.9_现代CMake大型C++项目构建实战_C++ CMake Install 项目、库的导出与安装
1.10_现代CMake大型C++项目构建实战_C++ CMake 再次变大与库的调用(二)
路径平滑|基于共轭梯度法的轨迹优化(ROS C++/Python)
《松灵ROS 2开讲啦》第六期 Nav2导航应用
重磅!把机械臂价格打下来!手搓成本仅5K的六轴达妙机械臂!【DIY乐趣】
2025工创赛物流搬运机器人 赛事解读与问题分析2
Unitree 2024 ROS暑期学校课程视频02-人形机器人H1开发分享
Gazebo机器人模型文件的语法
【考核用】调用opencv识别aruco码,在ros中更新tf
1.2_现代CMake大型C++项目构建实战_CMake语法基础
套件课程-RTABMap之3D雷达与RTK
Unitree 2024 ROS暑期学校课程视频01-四足机器人Go2开发分享
嵌入式开发2024 08阶段:Linux驱动(ros)
1.8_现代CMake大型C++项目构建实战_C++ CMake套娃_变大
2.0_(1)C++&QT&ROS联合编程项目实战_ROS串口网口工具 简单架构设计&ROS模块移出
塔洛斯实验室【ROS】- ROS基础介绍(第二期)
1.7_现代CMake大型C++项目构建实战_C++ 调用自己编译的库(一)
塔洛斯实验室【ROS】- ROS基础介绍(第一期)
作为 ROS1 开发人员学习 ROS2 并迁移您的 ROS 项目
1.6_现代CMake大型C++项目构建实战_C++ QT ROS联合编译