V
主页
京东 11.11 红包
5.1状态反馈与状态观测器—状态反馈
发布人
-
打开封面
下载高清视频
观看高清视频
视频下载器
5.2状态反馈与状态观测器—状态观测器
1.1.1系统的状态空间描述—基本概念
谐振峰值与修正值
针对自控/现控禁用计算器后的备考策略/做题规范/心态调整
2.3系统状态空间表达式的解—题型归纳(状态转移矩阵)
1.4.2系统的状态空间描述—传递函数转换对角标准型
1.5.1系统的状态空间描述—状态空间转换传递函数矩阵
1.3.2系统的状态空间描述—题型归纳(利用微分方程写状态空间表达式)
1.2.1系统的状态空间描述—系统建模
1.1.3系统的状态空间描述—题型归纳(由方框图确定状态空间表达式)
非最小相位奈氏图与伯德图绘制
3.2线性控制系统的能控性和能观性-题型归纳(可控性和可观性的综合应用)
自控公式串讲
1.1.2系统的状态空间描述—模拟结构图的绘制
电路系统基本知识(注3)
1.5.2系统的状态空间描述—题型归纳(由状态方程列写传递函数)
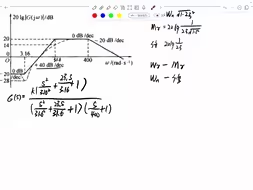
根据奈氏图(奈奎斯特图)反求开环传递函数
如何判断是绘制0度还是180度根轨迹
线性系统、非线性系统、定常系统和时变系统判断方法
抽象丝滑小连招~
2.2系统状态空间表达式的解—状态转移矩阵的性质
1.4.3系统的状态空间描述—题型归纳(利用传递函数写状态空间表达式)
为何传递函数的分子不能比分母次数高(注8)
3.1线性控制系统的能控性和能观性
1.3.1系统的状态空间描述—微分方程转换状态空间
奈氏图跳变问题
8.2自激振荡的基本概念
稳态误差的求解,以及何时不可以使用终值定理
带延迟环节的自振分析
2.1贝叶斯基础与贝叶斯决策
小偏差线性化(注5)
参数根轨迹问题,k值不在分子上如何绘制根轨迹?
动态过程,稳态过程,动态性能,稳态性能,稳定与否之间的关系(注10)
离散系统的稳定判据—题型归纳
复数相关概念(注2)
1.4.1系统的状态空间描述—传递函数转换可控标准型
3.3线性控制系统的能控能观分解
2.4系统状态空间表达式的解—题型归纳(求齐次非齐次状态方程的解)
4.1稳定性与李亚普诺夫方法
Z变换的定义及基本方法