V
主页
011校正的立体视觉——4双目视觉系统
发布人
打开封面
下载高清视频
观看高清视频
视频下载器
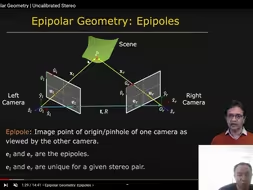
【哥伦比亚大学CV课程】012未校正的立体视觉——2对极几何约束
【哥伦比亚大学CV课程】011校正的立体视觉——2相机校正_获取投影矩阵
【哥伦比亚大学CV课程】012未校正的立体视觉——5计算深度
【哥伦比亚大学CV课程】011校正的立体视觉——1相机模型与内外参矩阵
【哥伦比亚大学CV课程】012未校正的立体视觉——3求解基础矩阵
【哥伦比亚大学CV课程】011校正的立体视觉——3提取内外参矩阵
【哥伦比亚大学CV课程】004成像——2透镜的聚焦与失焦
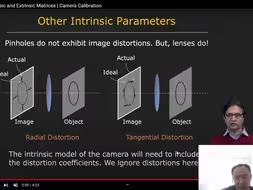
【哥伦比亚大学CV课程】004成像——4组合镜片/渐晕/色差/几何畸变
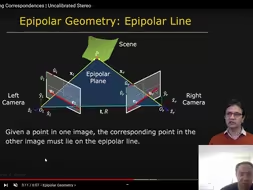
【哥伦比亚大学CV课程】012未校正的立体视觉——4寻找对应点
【三维重建与mesh】在zero-level上联合抽取Splats与SDF场,改善表面重建
【哥伦比亚大学CV课程】010主动照明方法——1编码结构光
【哥伦比亚大学CV课程】008图像处理2——4反卷积_维纳滤波_运动模糊
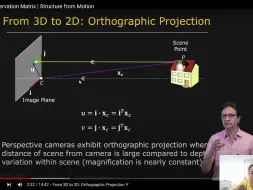
【哥伦比亚大学CV课程】002运动恢复结构SFM——1运动恢复结构的问题
【哥伦比亚大学CV课程】012未校正的立体视觉——1问题引入
北邮教授深入浅出三维视觉技术(全网质量最高)
爆火!DepthSplat:连接3DGS和深度估计!
【哥伦比亚大学CV课程】010主动照明方法——2结构光相移方法
【哥伦比亚大学CV课程】014边缘检测——1直线拟合和曲线拟合
2D相机实现3D定位?AI x 机械手视觉相机
【哥伦比亚大学CV课程】002运动恢复结构SFM——2观测矩阵
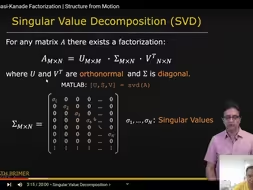
【哥伦比亚大学CV课程】002运动恢复结构SFM——4TK分解求M和S
在 After Effects 中制作最佳的 3D 视觉排版(动态图形)
【哥伦比亚大学CV课程】007图像处理1——5模板匹配_相关性
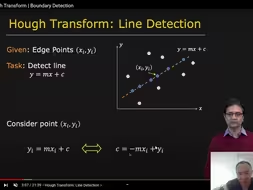
【哥伦比亚大学CV课程】014边缘检测——3霍夫变换检测直线和圆
【德国图宾根大学-自动驾驶课程】重建与运动——2立体视觉匹配与深度图
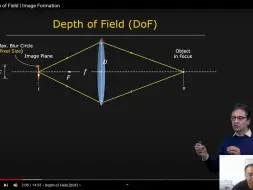
【哥伦比亚大学CV课程】004成像——3景深DoF/超焦距/孔径与DoF的关系
【哥伦比亚大学CV课程】010主动照明方法——3飞行时间与3d相机
3D分割一切新工作!SAMPart3D:分割3D对象中的一切部件!
港中文&浙大最新工作VLM-Grounder:VLM引导下的零样本3D视觉Grounding
【哥伦比亚大学CV课程】004成像——5广角相机
【哥伦比亚大学CV课程】017图像缝合——4图像变形与融合
【哥伦比亚大学CV课程】009失焦深度估计——1PSF函数
【哥伦比亚大学CV课程】007图像处理1——2LSIS系统与卷积_狄拉克函数
【哥伦比亚大学CV课程】001光流——2光流限制方程
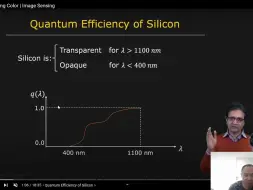
【哥伦比亚大学CV课程】005图像感知——4颜色感知:量子效率,人眼感光细胞,Bayer模式
【哥伦比亚大学CV课程】007图像处理1——4非线性滤波_双边滤波
【哥伦比亚大学CV课程】016图像分割——2KMeans算法和MeanShift算法
【杜克大学——图像与视频处理】P6_人类视觉系统
【哥伦比亚大学CV课程】005图像感知——5相机响应函数与HDR模式
【哥伦比亚大学CV课程】001光流——1光流与运动场