V
主页
京东 11.11 红包
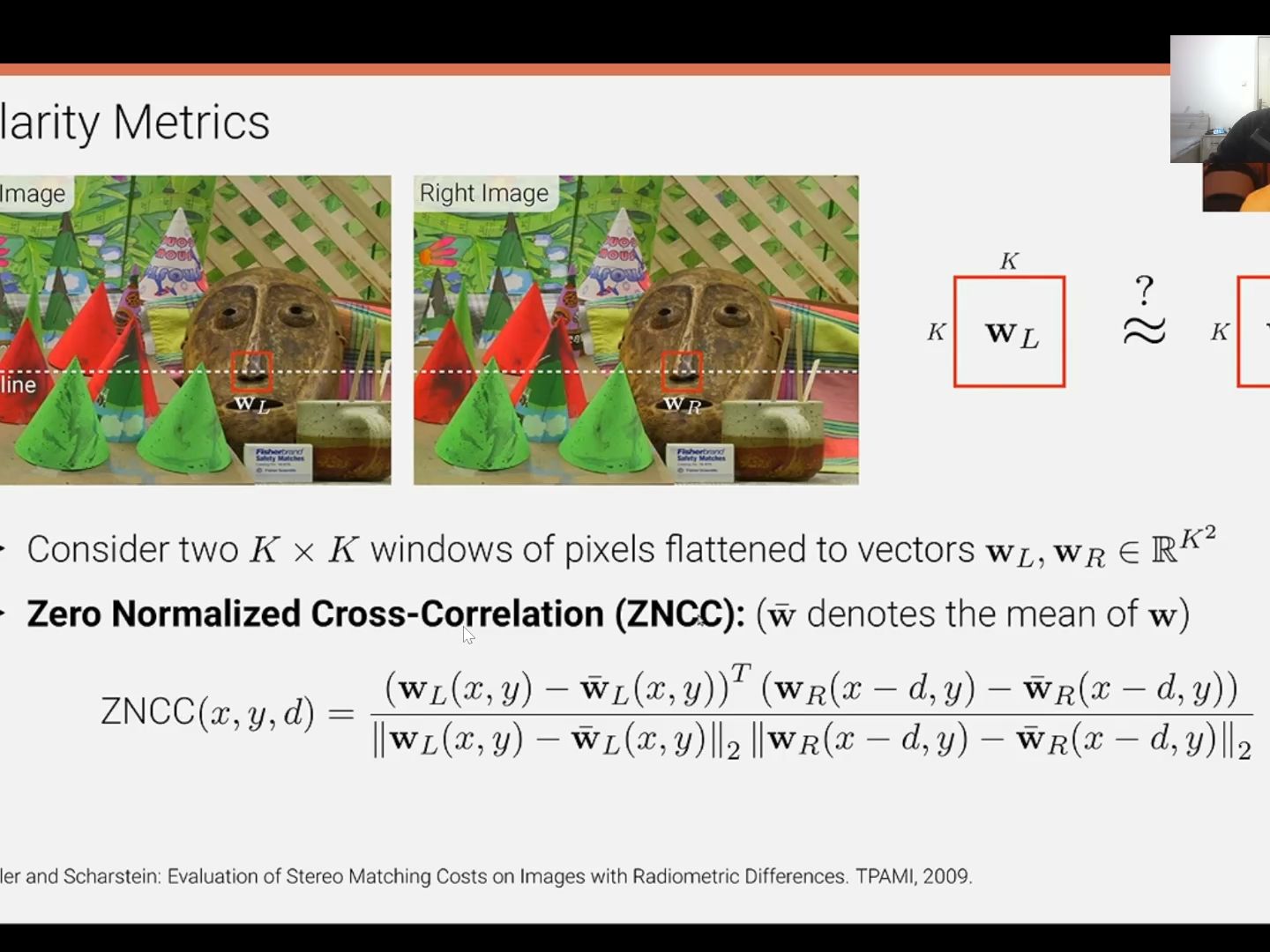
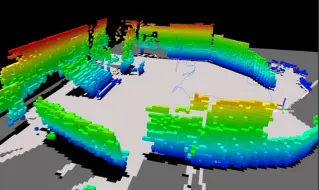
重建与运动——2立体视觉匹配与深度图
发布人
打开封面
下载高清视频
观看高清视频
视频下载器
【德国图宾根大学-自动驾驶课程】重建与运动——3光流
【德国图宾根大学-自动驾驶课程】重建与运动——4场景流
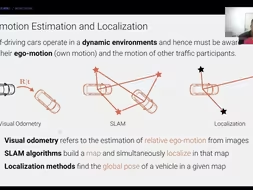
【德国图宾根大学-自动驾驶课程】里程计与SLAM——1介绍:里程计与SLAM和定位之间的关系
【德国图宾根大学-自动驾驶课程】里程计与SLAM——5定位:卫星定位,视觉定位,地图定位
【德国图宾根大学-自动驾驶课程】目标跟踪——3数据关联
【德国图宾根大学-自动驾驶课程】自动驾驶的历史
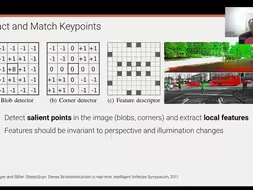
【德国图宾根大学-自动驾驶课程】里程计与SLAM——2VO:间接法与小孔成像原理
【德国图宾根大学-自动驾驶课程】目标检测——5_3D目标检测1
【德国图宾根大学-自动驾驶课程】目标跟踪——1介绍
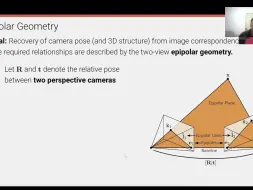
【德国图宾根大学-自动驾驶课程】重建与运动——1对极几何与图像矫正
【德国图宾根大学-自动驾驶课程】里程计与SLAM——3VO:对极几何/非线性优化BA/直接法
【德国图宾根大学-自动驾驶课程】目标检测——4基于区域的CNN
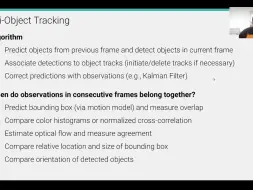
【德国图宾根大学-自动驾驶课程】目标跟踪——4整体理解
【德国图宾根大学-自动驾驶课程】目标检测——3滑动窗口与梯度方向直方图
【德国图宾根大学-自动驾驶课程】目标检测——5_3D目标检测2
【德国图宾根大学-自动驾驶课程】目标检测——1介绍
【哥伦比亚大学CV课程】012未校正的立体视觉——1问题引入
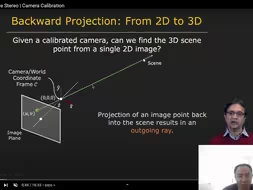
【哥伦比亚大学CV课程】011校正的立体视觉——2相机校正_获取投影矩阵
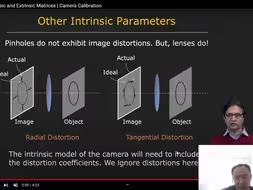
【哥伦比亚大学CV课程】011校正的立体视觉——1相机模型与内外参矩阵
【多伦多大学—自动驾驶课程】状态估计与定位week1-最小二乘法:1谷神星的发现与普通最小二乘法
【哥伦比亚大学CV课程】012未校正的立体视觉——3求解基础矩阵
上海AI Lab最新!Depth any Video:提升深度估计的一致性以及合成更多真实带有标注的数据
重新定义自动驾驶的动态视觉?谷歌提出几何优先的动态场景方法MonST3R
基于DepthCrafter实现少帅下飞机长视频深度估计,请问这波我还能分到一点流量吗?
【哥伦比亚大学CV课程】011校正的立体视觉——3提取内外参矩阵
道路分割与车道检测——1介绍与挑战
【杜克大学——图像与视频处理】P6_人类视觉系统
【哥伦比亚大学CV课程】011校正的立体视觉——4双目视觉系统
【哥伦比亚大学CV课程】009失焦深度估计——2从聚焦图像中估计深度
计算机视觉与SLAM的区别
基于深度学习的单目深度估计算法,华理计算机博士手把手带你解读原理+代码实战!
【哥伦比亚大学CV课程】009失焦深度估计——3从失焦图像中估计深度
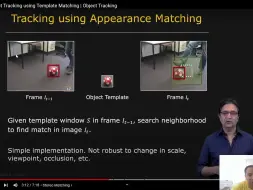
【哥伦比亚大学CV课程】003目标跟踪——3基于模板的目标匹配
【法线估计】StableNormal:基于扩散模型的由粗到细的法线估计方法
【哥伦比亚大学CV课程】019外观匹配——1学习外观
吹爆!博导带你全面解读基于深度学习的无人驾驶技术!深度估计、车道线检测、轨道估计、特斯拉技术等全详解!
【MIT的模型压缩与优化课程】14.1EfficientVit——SegmentAnything和SwinTransformer和点云SparseVit
Yolov8结构解析
网传极氪车主高速上用自动驾驶,司机和副驾竟盖着被子睡觉,网友炸锅
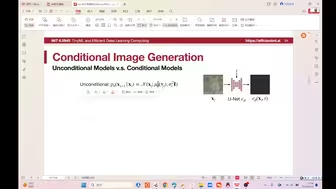
【MIT的模型压缩与优化课程】16.1DiffusionModel——带有条件的扩散模型