V
主页
3D打印软体机器人
发布人
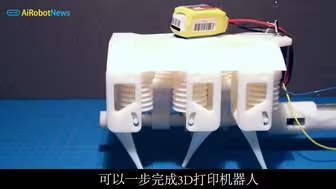
加利福尼亚大学圣地亚哥分校的工程师开发了一种不需要任何特殊设备的新方法,并且只需几分钟即可创建出柔软,灵活,3D打印的机器人。该创新源自对软机器人的构建方式的重新思考:加州大学圣地亚哥分校的研究人员从不考虑如何将软材料添加到刚性机器人主体中,而是从软主体入手,并在关键组件中添加了刚性特征。这些结构的灵感来自于昆虫的骨骼,骨骼既有柔软的部分又有刚性的部分,研究人员称他们的作品为“骨骼”。
打开封面
下载高清视频
观看高清视频
视频下载器
像蛇一样灵活的机械臂--探索者蛇臂机器人
靠动量轮保持平衡的自行车机器人
新型的波浪状爬行机器人
人造毛毛虫?一种基于织物的软体蠕虫机器人
Vicarious手术机器人
平衡球控制台
迪士尼双足机器人角色
一次性3D打印液压机器人
7球杂耍机器人
通过AI技术让图片动起来
Ascento安全机器人
平行SCARA机械臂平衡倒立摆
全自动化机器人药房Rowa VMAX
可跳跃、交流和协同工作的蚂蚁机器人
Zipline自主无人机运送系统
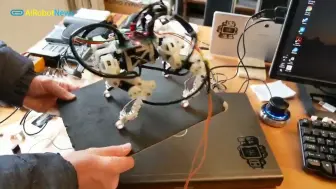
AIKO蛇形机器人-障碍物辅助运动和非线性系统控制
Vicarious Surgical手术机器人
受袋鼠启发的跳跃机器人
机器人科幻短片之未来战争《War Robot》
距离铁甲钢拳还远吗
能够为你折叠衣服的智能衣橱 Laundroid机器人
用100个Lego 搭建个远程遥控 多节机器人
康普顿未来智慧农场
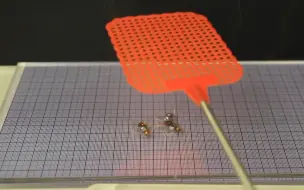
一种拍不死的柔软的机器昆虫
如何在您的数控机床中集成一个协作机器人?
机器人科幻短片之《DRONE》第一集
Care-O-bot 4家用社交机器人
使用人工智能的自动蔬菜收获机器人VER2
机器人科幻电影之《Finch》
整理家务不用愁!HSR家庭自主整理机器人系统
这才叫巡线机器人
机器人科幻短之《逃出生天》
四足机器人平衡测试
像植物卷须一样生长的一种新的软体机器人
机器人科幻短片之《欲望》
NI 六足机器人
制作一个全比例-霹雳5号机器人
第一款由人造肌肉执行器提供动力--并实现受控飞行的微型机器人
具有一个自由度的机器人驱动器模块
Cubli 一个可以跳跃、平衡和行走的立方体