V
主页
【PX4开源无人机】电力巡检无人机 | Emad Samuel与Malki Ebeid | PX4线上无人机开发者峰会2020
发布人
PX4线上无人机开发者峰会2020 电力巡检无人机 购买官方Pixhawk硬件:https://item.taobao.com/item.htm?id=569286312095
打开封面
下载高清视频
观看高清视频
视频下载器
【零基础无人机组装教学】Pixhawk4飞控+Tarot机架从组装到试飞视频
Auterion发布Skynode飞控机载计算机一体机 | 让企业级无人机开发更轻松
【PX4开源无人机】软件在环仿真(SITL)的配置和开发流程 | Jaeyoung Lim | PX4线上开发者峰会2020
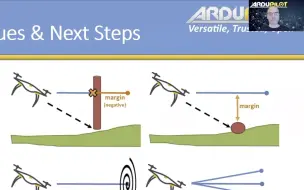
【ArduPilot开源飞控】物体躲避更新 | 核心开发者Randy Mackay讲解 | 2020年ArduPilot线上开发者大会
全新Holybro Durandal H7飞控刷写ArduPilot 4.0固件飞行测试 by 翔大模型
【开源飞控无人机】控制分配:重构PX4混控系统 | Julien Lecoeur & Silvan Fuhrer | PX4线上开发者峰会2020·直播录像
【PX4开源飞控无人机】用十年时间为无人机行业打造通用标准 | Lorenz Meier | PX4线上开发者峰会2020·直播录像
【无人机视觉】Auterion无人机在无GPS环境下自动执行桥梁巡检任务
PX4软件在环(SITL)仿真现已支持FlightGear
【PX4开源无人机】一种新的集群框架的现场测试 | Kyle Usbeck | PX4线上开发者峰会2020
7.2无人机PID参数调试
【PX4开源飞控无人机】事件驱动的自主飞行之路(三个思路) | Ram Grandhi & Deepak Singh | PX4线上开发者峰会2020·直播录像
【DIY开源无人机】国外大神的 Holybro Pixhawk 4 开箱
PX4 SITL与Microsoft Airsim终于解决兼容性问题 | 仿真飞行演示
【PX4开源无人机】航空机器人在高风险环境的自主路径规划 | Tung Dang | PX4线上开发者峰会2020
【PX4开源飞控无人机】多旋翼控制原理概述 从传感器到动力输出 | 两位Auterion工程师主讲 | PX4线上开发者峰会2020·直播录像
【无人机】Pixhawk硬件标准更新(FMUv5x) | 由Pixhawk/PX4创始人Lorenz Meier讲解 | PX4开发者峰会@ETH苏黎世联邦理工
【PX4开源飞控无人机】入门教学:在Linux(Ubuntu)上安装搭建PX4开发环境 | Brian Philips
【开源无人机】室内款低成本无人机M0-F250介绍及代码讲解(源码资源链接在简介)
【PX4开源飞控无人机】GE的高级载具动力学仿真的开源工作流程 | Matt Vacanti · Jesse Hoskins | PX4线上开发者峰会2020
【PX4开源飞控无人机】MAVSDK与软件在环仿真(SITL)入门教学 | AmadorUAVs | 官方教程系列
【PX4开源飞控无人机】电池知多少 | UVify的CEO - Hyon Lim | PX4线上开发者峰会2020·直播录像
【开源无人机】S2无人机桥梁巡检
Jumper T18全新五合一(5IN1)开源OpenTX系统遥控器发布 不再是四合一(4IN1)
新高通飞控平台ModalAI VOXL飞行中运行TensorFlow Lite在1080p视频上进行物体识别(飞控固件使用PX4)
又有一款开源飞控来啦!零一科技X6飞控&OneGNSS定位模块如何呢
【ArduPilot开源飞控】PI Connect 树莓派HAT | 由Stephen Dade讲解 | 2020年ArduPilot线上开发者大会
【PX4开源飞控无人机】自动化测试 - PX4开发中的一部分 | Julian Kent | PX4线上开发者峰会2020·直播录像
【无人机】PX4飞行任务架构 | 由Dennis Mannhart与Matthias Grob讲解 | PX4开发者峰会2019@ETH苏黎世联邦理工大学
【开源飞控无人机】使用NXP UAVCAN开发板入门UAVCAN v1 | Peter Van Der Perk | PX4线上开发者峰会2020·直播录像
【无人机】PX4在STEM教育的应用 | 这个团队结合树莓派做了很多有疯狂的项目 | 由俄国团队COEX演讲 | PX4开发者峰会
【PX4开源飞控无人机】AirSim:在科研和工业领域的应用场景 | 微软科研软件工程师Ratnesh Madaan | PX4线上开发者峰会2020·直播录像
【ArduPilot开源飞控】Ocius自主无人船 | 由Ocius软件工程师Matt McGill讲解 | 2020年ArduPilot线上开发者大会
【DIY开源无人机】Holybro S500 V2套机 | 开箱演示 | 官方推荐Pixhawk 4四轴四旋翼飞行器套件 | 德语
【无人机】现代无人机系统的高能效电力推进 | 由Zubax的Alexander Sysoev和Pavel Kirienko主讲 | PX4开发者峰会2019
【开源无人机】ROS无人机编队代码讲解
无人机开发仿真现在可以模拟天气影响啦 | PX4在FlightGear进行SITL仿真
Holybro Pixhawk4 S500 Kit 四旋翼无人机套机装机演示-01安装电机
【ArduPilot开源飞控】集群与灯光秀 | 由ArduBee项目研发总监Giorgio Rinolfi讲解 | 2020年ArduPilot线上开发者大会
【ArduPilot开源飞控】直升机更新 | 由直升机维护者Bill Geyer讲解 | 2020年ArduPilot线上开发者大会