V
主页
【PX4开源飞控无人机】GE的高级载具动力学仿真的开源工作流程 | Matt Vacanti · Jesse Hoskins | PX4线上开发者峰会2020
发布人
PX4线上开发者峰会2020 Matt Vacanti · Jesse Hoskins GE的高级载具动力仿真的开源工作流程 购买官方Pixhawk飞控硬件:https://item.taobao.com/item.htm?id=569286312095
打开封面
下载高清视频
观看高清视频
视频下载器
【PX4开源飞控无人机】多旋翼控制原理概述 从传感器到动力输出 | 两位Auterion工程师主讲 | PX4线上开发者峰会2020·直播录像
【ArduPilot开源飞控】EFK更新 | EFK2/EKF3作者Paul Riseborough讲解 | 2020年ArduPilot线上开发者大会
【无人机】硬错误调试HardFault Debugging | 由David Sidrane讲解 | PX4开发者峰会2019@ETH苏黎世联邦理工大学
【无人机】MAVLink3进度更新 | 暂时不会有MAVLink3了 | 由Lorenz Meier讲解 | PX4开发者峰会2019@ETH苏黎世联邦理工大学
【PX4开源飞控无人机】Skynode已准备好上天 | Auterion产品营销总监Laurent Zimmerli | PX4线上开发者峰会2020·直播录像
用MP和最新的ArduPilot固件为Pixhawk等兼容飞控升级ChibiOS Bootloader 由ArduCopter作者Randy演示
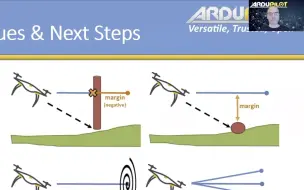
【ArduPilot开源飞控】物体躲避更新 | 核心开发者Randy Mackay讲解 | 2020年ArduPilot线上开发者大会
【无人机】PX4飞控的过去现在和未来 | 由PX4创始人Lorenz Meier博士讲解 | PX4开发者峰会@ETH苏黎世联邦理工大学
【PX4开源飞控】这是无人机?飞机?不,是Jetman!| Flybotix研发工程师Julien Lecoeur | PX4线上开发者峰会2020·直播录像
【遥控器】SkyDroid云卓T12无人机/航模/植保机图数传遥控一体机 - 评测,设置,延迟测试
【PX4开源飞控无人机】为MAVSDK扩展新特性 | MAVSDK维护者Jonas Vautherin | PX4线上开发者峰会2020·直播录像
【PX4开源无人机】软件在环仿真(SITL)的配置和开发流程 | Jaeyoung Lim | PX4线上开发者峰会2020
【PX4开源飞控】独立SoC的开放平台帮助打造高性能AI人工智能无人机 | 96Boards总监Yang Zhang | PX4线上开发者峰会2020·直播录像
【无人机】PX4软件在环仿真(SITL)改进与ROS集成 | 由ROS平台经理Tully Foote讲解 | PX4开发者峰会2019@ETH苏黎世联邦理工大学
【开源飞控】Pixhawk:无人机上的社区驱动的开源标准 | 创始人Lorenz Meier与核心开发者们 | PX4线上开发者峰会2020·直播录像
【无人机】Pixhawk硬件标准更新(FMUv5x) | 由Pixhawk/PX4创始人Lorenz Meier讲解 | PX4开发者峰会@ETH苏黎世联邦理工
【PX4开源飞控无人机】在虚拟世界飞行:航天教育机器人的新现实 | COEX · 俄罗斯Clover教学无人机 | PX4线上开发者峰会2020·直播录像
【PX4开源飞控无人机】入门教学:在Linux(Ubuntu)上安装搭建PX4开发环境 | Brian Philips
【PX4开源无人机】SmartWings: 飞行器的主动湍流抑制 | Andras Galffy | PX4线上开发者峰会2020
【无人机】VTOL垂起无人机控制与空速错误检测 | 由Roman Bapst讲解 | PX4开发者峰会2019
【PX4开源飞控无人机】嵌入式机器学习在实践中的应用 | Arm物联网生态运营经理Alessandro Grande | PX4线上开发者峰会2020·直播录像
【PX4开源无人机】电力巡检无人机 | Emad Samuel与Malki Ebeid | PX4线上无人机开发者峰会2020
【PX4开源无人机】深入了解多轴无人机控制系统架构 | Anton Erasmus | PX4线上无人机开发者峰会2020
【PX4开源无人机】一种新的集群框架的现场测试 | Kyle Usbeck | PX4线上开发者峰会2020
【无人机】使用MAVSDK通过MAVLink控制无人机 | 由MAVSDK维护者Jonas Vautherin讲解 | PX4开发者峰会@ETH苏黎世联邦理工
【PX4开源无人机】如何给PX4贡献文档 | Hamish Willee | PX4线上开发者峰会2020
【PX4开源飞控无人机】事件驱动的自主飞行之路(三个思路) | Ram Grandhi & Deepak Singh | PX4线上开发者峰会2020·直播录像
【PX4开源飞控无人机】MAVSDK与软件在环仿真(SITL)入门教学 | AmadorUAVs | 官方教程系列
【PX4开源飞控无人机】超视距无人机的软件和工业标准的未来 | James Howard | PX4线上开发者峰会2020·直播录像
【PX4开源飞控无人机】电池知多少 | UVify的CEO - Hyon Lim | PX4线上开发者峰会2020·直播录像
【PX4开源无人机】高中生团队分享自主无人机竞赛经验 | AmadorUAVs | PX4线上开发者峰会2020
【无人机】ROS2为PX4增添新动力 | 由Nuno Marques讲解 | PX4开发者峰会2019@ETH苏黎世联邦理工大学
【PX4开源飞控无人机】入门教学:在MacOS上安装搭建PX4开发环境 | Brian Philips
空中无人母舰:“九天”亮相珠海,能挂蜂巢无人机,世界独一无二
【PX4开源飞控无人机】自动化测试 - PX4开发中的一部分 | Julian Kent | PX4线上开发者峰会2020·直播录像
【ArduPilot开源飞控】集群与灯光秀 | 由ArduBee项目研发总监Giorgio Rinolfi讲解 | 2020年ArduPilot线上开发者大会
7.2无人机PID参数调试
自动驾驶入门技术全栈实战解析-2-定位篇
【开源飞控】QGroundControl(QGC地面站)入门教学
【ArduPilot开源飞控】OpenTX Lua数传与FrSky回传库| @yaapu Alex Apostoli | 2020年ArduPilot开发者大会