V
主页
14_4KUKA机器人流水生产线的搬运、码垛运动编程
发布人
库卡机器人实用编程教程
打开封面
下载高清视频
观看高清视频
视频下载器
第27讲 KUKA机器人配置自动模式
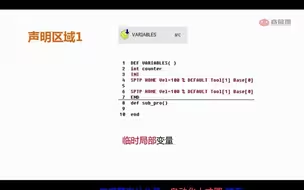
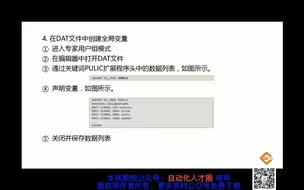
第02讲 KUKA机器人变量
工业机器人技能提升培训第五讲课程
第20讲 KUKA机器人调用当前位置变量
10_11KUKA机器人主程序对子程序的调用
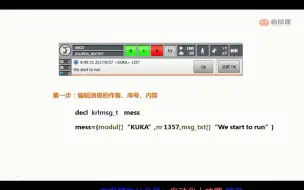
KUKA机器人高级编程(上)5-2 编写消息程序C
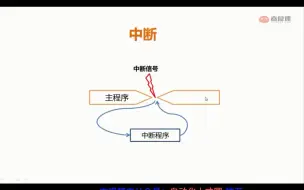
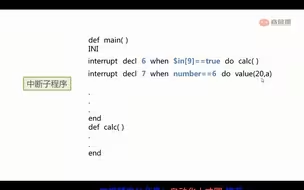
第26讲 KUKA机器人中断编程
第28讲 KUKA机器人配置外部自动模式
KUKA机器人高级编程(上)2-1 变量复习C
KUKA机器人高级编程(下)5-9 resume指令
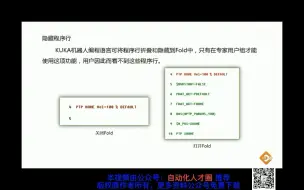
第11讲 KUKA机器人fold用法
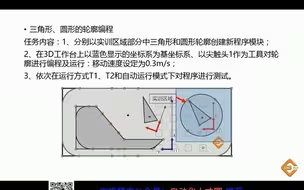
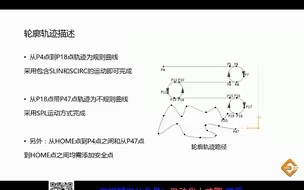
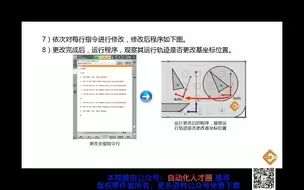
12_7KUKA机器人精确定位与逼近运动-三角形轮廓编程
04-6KUKA机器人机器人的手动运行-1
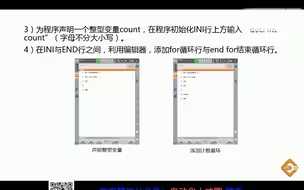
第14讲 KUKA机器人FOR循环
04-4KUKA机器人示教器的基本操作-1
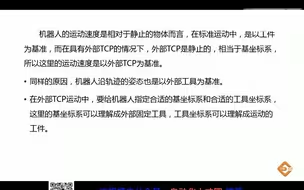
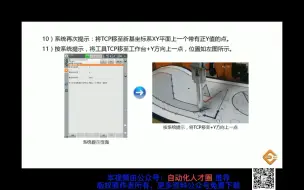
14_1KUKA机器人具有外部TCP的运动编程
15_7KUKA机器人循环技术编程
15_3KUKA机器人程序的流程控制编程
第13讲 KUKA机器人询问或if分支
13_7KUKA机器人采用样条组的轨迹轮廓编程
10_10KUKA机器人程序结构化设计
KUKA机器人使用KRL程序语句进行拆垛码垛
07_4KUKA机器人抓爪的工具测量
10_6KUKA机器人简单数据和数组的使用1
04-1KUKA机器人初识示教器-1
02-2KUKA机器人的机械系统-1
第05讲 KUKA机器人等待功能的编程
KUKA机器人高级编程(上)2-3 结构体structureC
第15讲 KUKA机器人repeat直到型循环
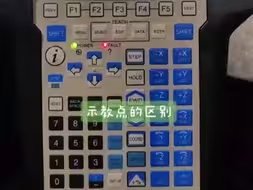
第十四期:示教点的区别
KUKA机器人高级编程(上)4-1 函数定义C
KUKA机器人高级编程(下)1-1 主要内容介绍C
KUKA机器人高级编程(上)2-2 数组arrayC
09_2KUKA机器人工作台基坐标系的测量1
09_3KUKA机器人设定机器人BASE坐标偏移1
KUKA机器人高级编程(上)5-8 对话框举例C
第06讲 KUKA机器人简单切换功能的编程
KUKA机器人高级编程(上)5-6 等待信息举例C
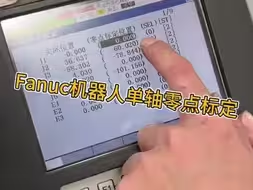
发那科机器人单轴零点标定
KUKA机器人高级编程(下)5-6 打开和关闭中断C