V
主页
京东 11.11 红包
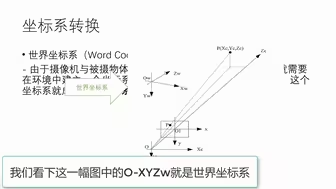
三维重建第四课:相机标定原理步骤(二)世界坐标系到相机坐标系与畸变
发布人
这是第三节课第继续,将讲解如何针孔成像原理,如何从世界坐标系转换为像素坐标系,和畸变参数 这个up主,白天打工,晚上整理资料和录制课程,目前大概能保证一周更新1到2节课。 需要相关资料(PPT和代码)或者对这课感兴趣对,可以加这个up主微信:xiaov2016211830
打开封面
下载高清视频
观看高清视频
视频下载器
三维重建第三课:相机标定原理步骤(一)坐标系变换
三维重建第六课:相机标定原理步骤(四)张正友相机标定法数学推导求解
三维重建第七课:相机标定代码讲解
【三维重建完全可自学教程】2024B站最完整的计算机视觉-3D三维重建教程分享!知名博士通俗易懂的解释,学三维重建真的不难!
VTK+Qt+PCL+VS显示点云 点云处理 PCL点云库VTK三维重建 PCL 点云 点云处理
终于有人把三维点云与三维重建讲得如此简单了!算法解读、项目实战、论文解读、环境配置
【3D点云+三维重建】最好出论文的研究方向,博导带你从零解读两大方向的核心算法PointNet与NeuralRecon!赶紧收藏
三维重建第一课:三维重建技术介绍及学习路径
三维重建第10课:大家好,好久不见了。
【听风的蚕】电子信息战第五集:精进科研
【有误待修】多视图三维重建技术发展
惊人的2050年预测揭晓:世界顶级人工智能专家希望你知道的事
三维空间扫描仪,轻松重建小树林
【三维重建】Robust 3D GS:对模糊性进行建模的三维高斯重建方法
【三维重建】IEEE TVCG论文解读 - 面向3D点云的锐利特征检测网络
3D Gaussian splatting 结合雷达点云重建
【状态记录】虚幻引擎缝合三维重建
三维重建第八课:LM算法之优化方法初探
专访:谷歌首席执行官桑达尔·皮查伊 (Sundar Pichai),人工智能作为一种新技术,可以与火和电相媲美
基于Yolov8和双目立体匹配的昆虫三维定位系统!
三坐标最基础理论知识_三角函数
极大似然估计&最大后验估计
【附代码】2024全网公认最通俗易懂的(吴恩达机器学习)教程,超爽中英教学!!
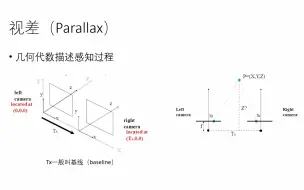
三维重建第二课:双目立体视觉重建基本原理
【三维重建】大场景的分层3D GS重建
重生之我是六年级数学王者
人工智能预测了这些即将在2024发生的可怕预言,有些正在实现
三维重建第九课:LM(二)优化方法演进
【三维重建】photoslam:一种基于超源语的高保真SLAM框架
AI新作 | 大模型增强稀疏3D重建
三维空间扫描仪挑战:长走廊、白墙、玻璃
如何直观理解PPO算法?博士详解近端策略优化算法原理+公式推导+训练实例!强化学习、深度强化学习、李宏毅
【超长】从0到「终极XY目标」第1季 第一集
【人工智能趋势】未来AI 造福人类还是毁灭人类
FAST-LIVO2: 高效鲁棒的激光雷达-惯性-视觉融合算法,可用于实时高精度三维重建,无人机和机器人在退化场景的机载定位。
NeurIPS 2024 Mamba再下一城!Hamba:3D手部重建新框架
2024诺贝尔物理学奖授予人工智能: 有一定道理,但为时尚早
强推!不愧是李飞飞,一口把深度学习、计算机视觉、神经网络、图像处理、图像分割、目标检测、物体识别给讲透了,新手小白秒上手!-人工智能/计算机视觉
微分智飞|惊险探秘!双层50米落差采空区重建全记录
【B站强推】2024公认最通俗易懂的3D点云教程完整版,【点云配准、分割、补全、数据处理及pointnet算法解读】学完吊打面试官!计算机视觉|点云