V
主页
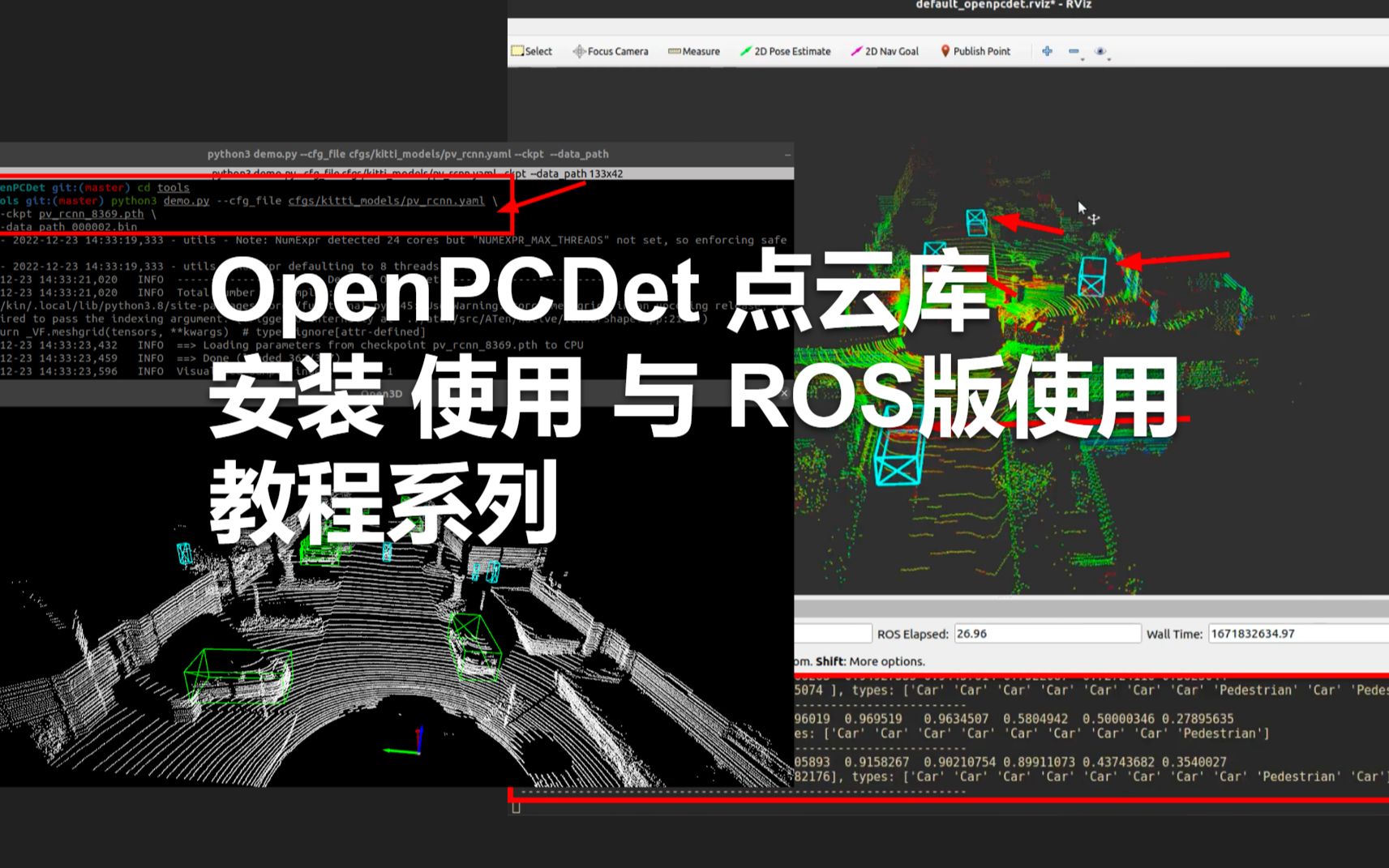
【教程】OpenPCDet 部署运行及ROS版本扩展 由 LiDAR 快速出检测框给到下游任务使用
发布人
手把手系列之OpenPCDet安装 使用 ROS版,基于前人的代码,具体可看repo的参考处,将依赖更简洁,后面有问题见代码commit更新,github和gitee会同步更新 代码链接:https://github.com/Kin-Zhang/OpenPCDet_ros,https://gitee.com/kin_zhang/open-pcdet_ros 博客链接:https://www.cnblogs.com/kin-zhang/p/17002980.html
打开封面
下载高清视频
观看高清视频
视频下载器
【教程】简易 ndt_slam 部署运行说明 由 LiDAR 快速获取定位
终于画出来咯
【教程】CPU GPU 桌面监控设置 配合Rainmeter使用
【Autoware与Carla】Vision_ssd_detect 视觉检测识别示意
大田作业机器人-激光除草应用
本科毕业设计——ROS小车
北欧博士申请 投递到面试 详细完整流程梳理 介绍及相关经验
航空发动机强度与振动 课设教程(答辩用)
【Autoware】建图ndt_mapping示意
【ROS】机器人小车Gazebo仿真
科研论文小技巧 PPT 绘制框图 插入花体公式 会议演讲
本科毕设:基于ROS的送餐小车
16天从零学习ROS,现在会建图了
终于改装完成,户外机器人底盘,ROS,四轮驱动+阿克曼,支持二开
RoboCup机器人日常调试
【Autoware与Carla】OpenPlanner 仿真示意 带避障
RouterOS 7.15 端到端WireGuard隧道实验及新界面解说
地图动态障碍物去除总结 ITSC'23: A Dynamic Points Removal Benchmark in Point Cloud Maps
小白教小白之简单版【搭建个人网页】
【Autoware与Carla】OpenPlanner 仿真示意 无避障
能导航了,但只能导一点点,不能导多了
论文写作之矢量图输出(ppt制作框图并无损输出pdf到latex进行嵌入)
UE4 布置相机教学 轨迹顺滑视频输出
欧洲留学行李携带建议系列[2] 衣物系列
瑞典留学/工作 所有身份证件事项办理时间轴参考 【包含 人口号 人口卡 银行卡 Bankid
Windows 10 镜像安装示意 特别长闲聊版 内含 相关软件推荐 系统设置 等等
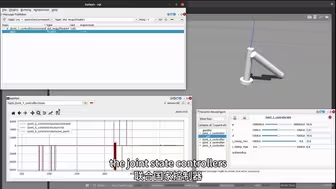
03-用于机械臂关节的ROS控制器(上)
Ros1通过moveit、话题通讯和tf变换等操作实现安装d435i相机和夹爪的ur机械臂对空间中球体的定位与抓取
【自制中英】宾夕法尼亚大学机器人专项课程五 预估与学习 - Robotics: Estimation and Learning
【中英】基于Carla的自动驾驶评估平台 leaderboard
泰山派|修改分区|成功安装ROS
HANDLER——基于YOLOv8及SLAM算法的智能家庭服务机器人
求助~ros机械臂卡住
毕设记录第一集——gazebo五车三机仿真环境
【教程】Quickly-CARLA 自动驾驶开源仿真器介绍 及 UP主开发的小调试GUI工具
导航遇到故障不用怕,原路倒回去就好了!
【Autoware】基本自动驾驶部分示意
ROS 智能小车 未知地图自主导航建图 机器人导论大作业留档
泰山派|翻车实况|试图安装ROS
详解RouterOS的WireGuard隧道AllowedIP(AllowedAddress)多点隧道(多peer)篇