V
主页
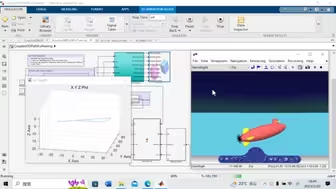
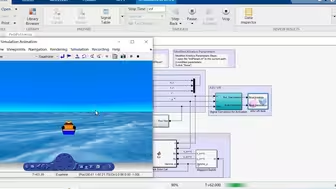
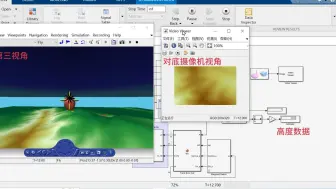
过驱动ROV动力定位仿真(批仿真),授人以渔
发布人
过驱动ROV动力定位仿真(批仿真),授人以渔。 直接上源码:https://github.com/chuanstudyup/Overactuated-ROV-Simulation
打开封面
下载高清视频
观看高清视频
视频下载器
AUV卫星拒止情况下水池横向定位方法与仿真
AUV三维路径跟踪仿真Matlab/Simulink
ASV水面路径跟踪仿真-三自由度
AUV海底探测仿真环境搭建与测试
微小型自主水下机器人 ARMs 1.0
AUV深度跟踪仿真验证ALOS和ADRC
基于Qt的航行器地图轨迹回放软件
ARMs AUV 20-20超越操纵试验
ARMs AUV 带缆调试
见刊了,毕业半年,他还在输出(然而并没有)
ARMs AUV水下回转操纵性试验
NVIDIA Isaac Sim 助力机器人开发(CES2023)
科研案例|基于 PyBullet 的具身智能软硬件平台 BestMan
哈工大博士教你solidworks拖链的配合及动画制作
25工训校赛结束了看着还有很多进步空间
Mujoco安装指南
RobtoStudio与TIA+HMI联合仿真创建传送带自动运行系演示九
奔跑有点难度,步态很抽象,大佬们有没有什么好建议
上海交通大学云汉交龙战队RM干货分享——串联腿步兵机械结构(中)
【无人艇】【自适应动态控制】不确定动力学自主无人艇编队的自适应动态表面控制
《ROS 2机器人开发从入门到实践》7.2.1构建第一章导航地图
Robot Sailboat-回忆在HUST ARMs实验室的时光
mujoco和Pinocchio人形机器人足底速度算法验证工具
ansys第五次作业,SolidWorks小车建模+ansys小车碰撞分析
无限逼近人类身体构造,人工肌肉驱动的类人机器人Torso登场
《ROS 2机器人开发从入门到实践》6.5.2使用 Gazebo 接入 ros2_control
波士顿动力机器人可以完全自动工作了
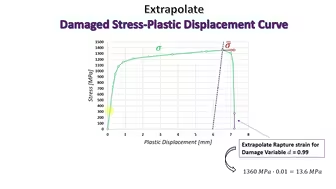
有限元模拟材料损伤演变
【手把手教做轮足机器人】7_滚转姿态控制【原理讲解+代码开源】
2024年斯坦福机器人中心一览|2024【斯坦福】
仿真一下,让大家看看阻抗对插入损耗与回波损耗的影响
卡扣插入仿真
华东交通大学第十三届校智能车竞赛(光电竞速)
CT扫描图像自动生成comsol三维几何、多孔介质、裂隙、Avizo、两相流、油气、重构、dragonfly、阈值分割、二维多孔介质
用易拉罐制作功能齐全的喷气发动机可以
【电赛备战1】用MATLAB仿真认识电源类电路——BUCK、BOOST、逆变电路
基于PLC控制的洗衣机冲孔仿真设计
基于Ansys Fluent的PCM材料的动力电池散热模拟
我的2024机创仿生蝴蝶
当清华博士来设计齿轮齿条翻转机构