V
主页
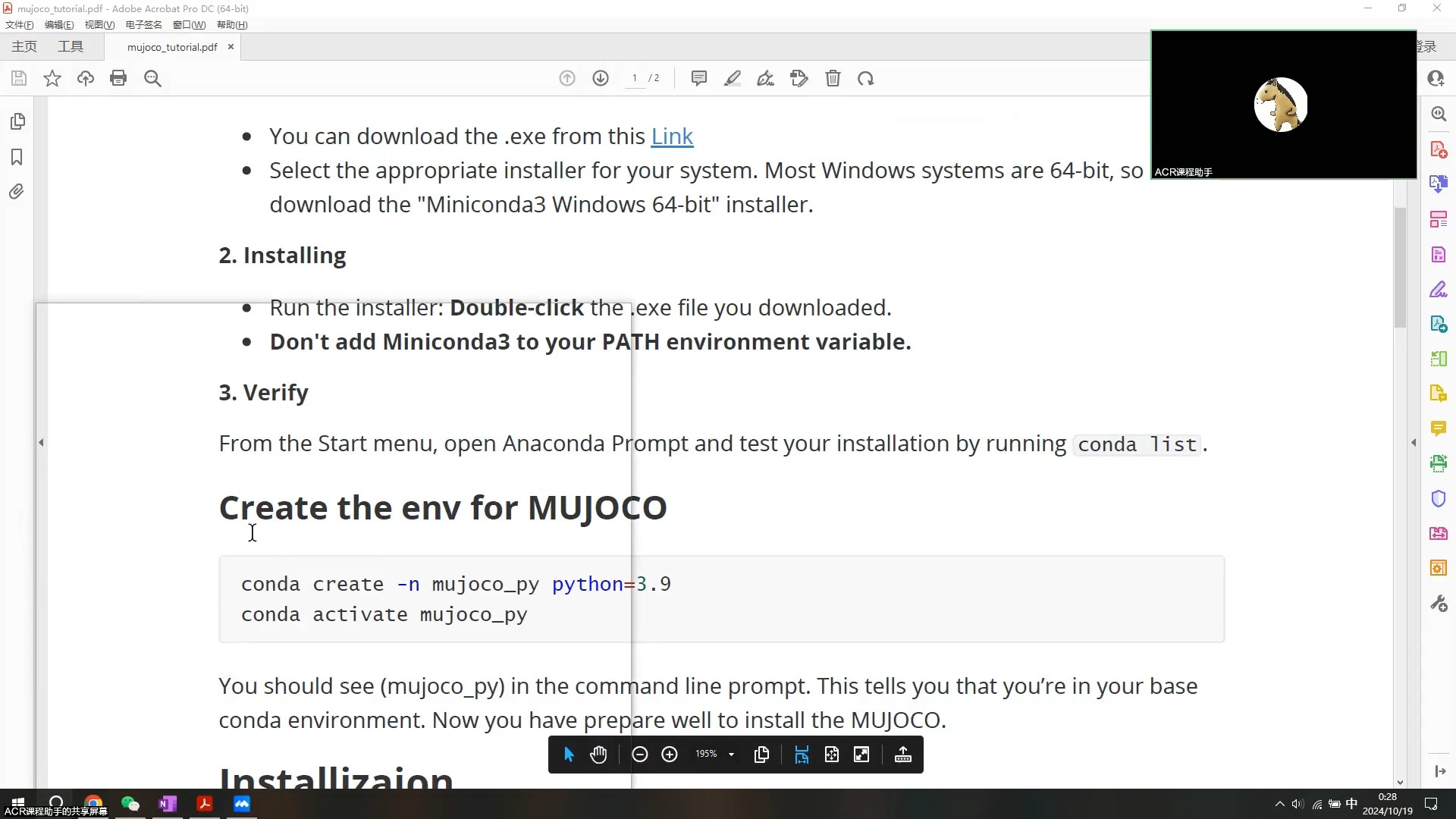
Mujoco安装指南
发布人
打开封面
下载高清视频
观看高清视频
视频下载器
使用ROS2-Control + RL来控制四足机器人
智能车的最后一舞!!!它必定是绝响!!!
【超多模型MPC算法】开源Mujoco-MPC演示
dreamWaq复现尝试
Diffusion Policy 结合 PPO 模仿+强化 (下)
奔跑有点难度,步态很抽象,大佬们有没有什么好建议
【开源】宇树Unitree Go2四足机器人/机器狗Isaac Sim/Isaac Lab ROS2仿真平台
RLChina 2024 | 3小时强化学习入门课程-上
双足机器人近期成果
g1套humanoid_gym
Lec1-1:控制与机器学习的线性代数基础
《ROS 2机器人开发从入门到实践》7.3.1Navigation2介绍与安装
程序同步动作的用法
如何用rl_sar采集训练执行器网络的数据
具身智能机械臂实操入门课程-04(完):模型推理和抓取效果验证
ANSYS Workbench从入门到精通|16个模块帮你快速入门!
Vivado使用Vscode作为编辑器,Modelsim联合仿真
低成本无刷双足机器人硬件设计+调试
Lec5-2: 概率论基础2:随机向量,期望、条件期望(卡尔曼滤波原理与应用)
右边两足走路也是双足行走
【Python】逆运动学——限位奇异避免
COMSOL® 求解器介绍及设置方法
Lecture0 线性代数回顾,谁需要和为什么要学线性代数?【南科大ME424 现代控制与最优估计 课程系列视频】
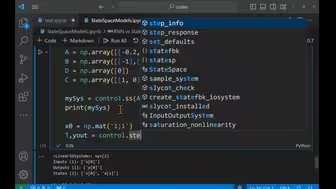
Lec2-5: Python例子:仿真与非线性系统线性化
【Yao Class Seminar】关于强化学习可解释性的talk
不愧是顶会收割机!迪哥精讲强化学习4大主流算法:PPO、Q-learning、DQN、A3C 50集入门到精通!
Fluent边界条件1
破防!!连片哥都看不上臭底边的直播间😭😭
Go2迷彩套装
制动滑行能量回收——基于simulink的纯电动汽车VCU建模
Lec7:扩展卡尔曼滤波(Extended Kalman Filter)
强化学习魅力时刻
6个智能体的编队导航与避障_补充实验
强化学习,启动!
Lec8-1: Mujoco Tutorial- 仿真原理,核心模块,与机器人仿真器
基于点式双足机器人的强化学习测试
我们是如何实现直膝行走的?
《ROS 2机器人开发从入门到实践》7.2.1构建第一章导航地图
【up自制开源】30分钟拥有自己的具身智能触觉系统!柔性触觉不再遥不可及
CST编码超材料仿真