V
主页
LabView小练习1
发布人
打开封面
下载高清视频
观看高清视频
视频下载器
输送链码垛2
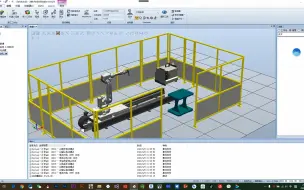
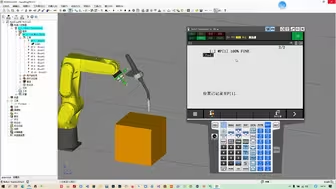
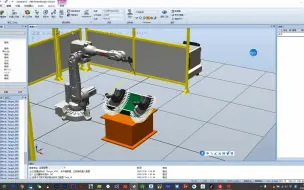
25.RoboGuide系统创建和基本操作
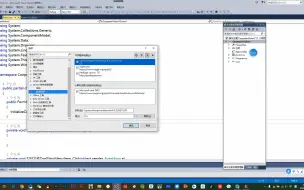
21.连接MySQL数据库实现登录、注册、密码修改和个人信息修改等功能【选看】
输送链搬运码垛1
MCGS触摸屏与plc通讯连接
带导轨的机器人(模块化编程)2
11.激光切割任务
1.影调的应用
22.工作站逻辑
图像处理——反转片生成
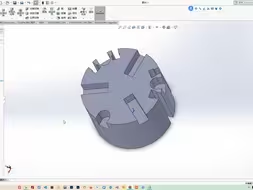
7.加强筋与抽壳
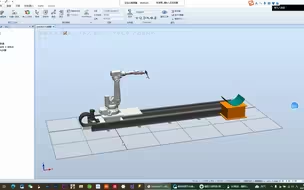
带导轨的机器人(轨迹编程)1
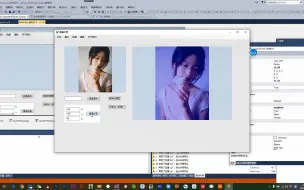
简易图像浏览器制作2.1
10.连接SQLserve实现登录功能
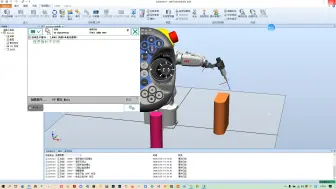
1.0IO信号的定义和基本示教编程
27.发那科机器人坐标系的创建
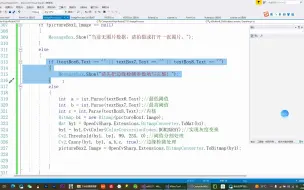
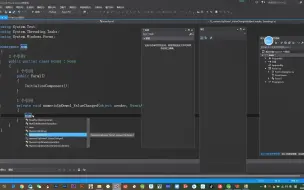
C#中的OpencvSharp配置
图像处理——通道分离
11.活塞运动仿真
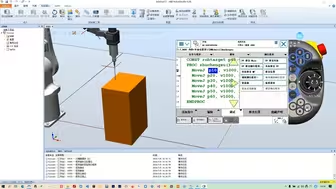
3.简单的示教编程
图像处理-彩色图像转换为黑白图像
带导轨的机器人andSmart组件初识
7.运动指令的学习(二)
16.边缘提取
3.气缸绘制(二)
24.两个bug的解决
20.数据库的连接
12.SQLserve数据库开启IP远程连接和测试【重要】
26.发那科机器人简单的示教编程【与ABB的异同】
11.图像灰度变换的实现
3.气缸绘制(三)
1.4容器和数字调节控件
14.IO配置和信号的使用
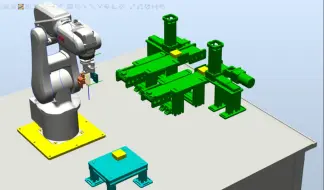
工业机器人系统集成组态1
34.汽车灯罩涂胶4【实现涂胶工艺控制】
13激光切割完整的(二班专用)
1.2激光切割离线编程
图像处理-亮度调节2(遍历图像中的像素)
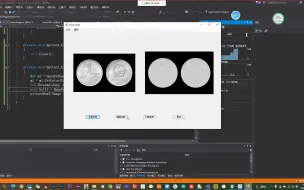
opencvsharp的使用:如何进行基本的图像处理5.1
循环和条件框图2